
Selective Compliance Articulated Robot ARM (SCARA)
 Les robots SCARA ont vu le jour 17 ans après l’introduction du premier robot industriel. Un tout nouveau concept spécifique pour une certaine branche d’applications. Pourquoi ce nouveau développement était-il nécessaire? Pourquoi celui-ci est encore utilisé? Et celui-ci a-t-il encore un avenir?
Les robots SCARA ont vu le jour 17 ans après l’introduction du premier robot industriel. Un tout nouveau concept spécifique pour une certaine branche d’applications. Pourquoi ce nouveau développement était-il nécessaire? Pourquoi celui-ci est encore utilisé? Et celui-ci a-t-il encore un avenir?
Configuration Minimale, plage de travail maximale
Nous écrivons 1961, l’année au cours de laquelle le premier robot industriel a été engagé dans un environnement de production industriel. En 1978 est arrivé SCARA sur le marché, un nouveau type de robot avec une configuration spécifique qui devait offrir une alternative aux applications d’assemblage existantes. Les exigences de conception du SCARA étaient simples: le robot devait permettre de saisir des produits et de les déposer à un autre emplacement avec un nombre minimal d’axes. La manipulation complexe est superflue dans un tel contexte. A la base du nouveau type de robot réside une observation faite par le professeur japonais Makino. Dans une chaîne d’assemblage manuelle, 80% des mouvements étaient linéaires et se situaient dans une plage de travail similaire à celle du bras humain.
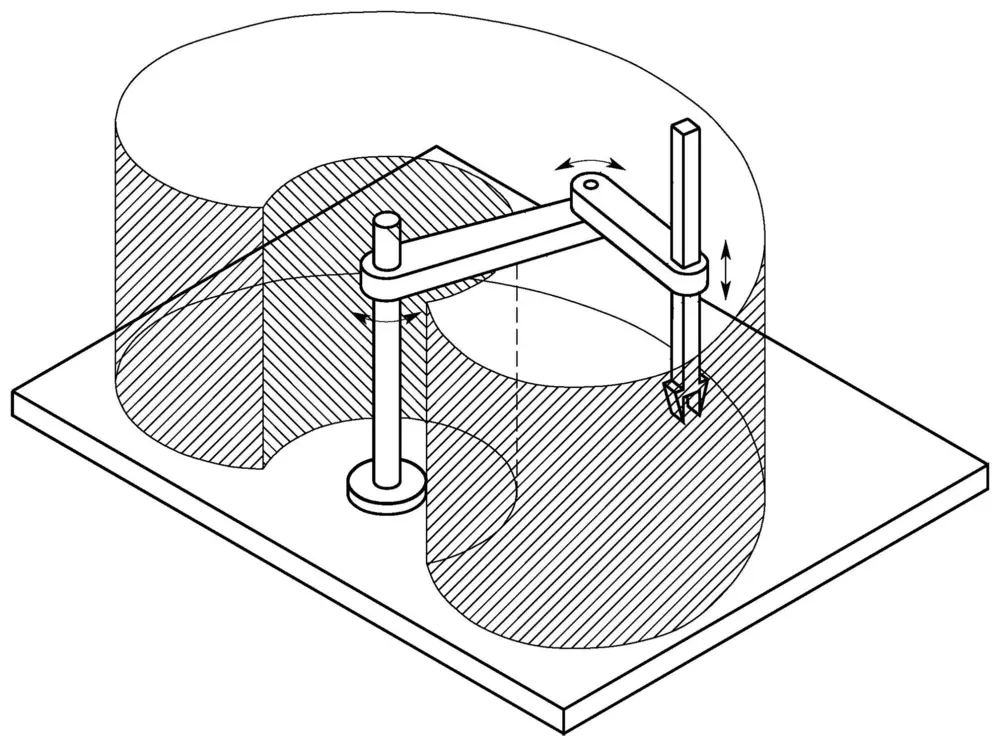
La solution se situait donc dans l’imitation du mouvement du bras humain dans un plan horizontal. Deux degrés de sécurité/axes sont nécessaires pour cela: une épaule et un coude qui peuvent chacun exécuter un mouvement analogue à celui de l’avant-bras et du bras supérieur. Par ailleurs, on doit prévoir un troisième axe qui exécute le mouvement vertical pour saisir et déposer des objets, le poignet. Pour la simplicité typiquement un axe linéaire de petite portée.
Dans certains cas, il est aussi apparu nécessaire que les objets puissent être saisis et déposés selon une certaine orientation. En particulier pour l’assemblage d’éléments asymétriques. Un quatrième axe est parfois prévu dans le poignet; il apporte une orientation autour de la perpendiculaire au plan. Une configuration minimale (3 à 4 axes) est ainsi obtenue avec une plage de travail et une performance maximales pour les applications que vise le robot.

What’s in a name?
La configuration SCARA résulte dans une propriété typique qui offre des avantages dans bien des cas. SCARA signifie ‘Selective Compliance Articulated Robot Arm’. ‘Articulated’ fait référence au fait qu’il s’agit d’un bras de robot avec articulations rotatives (abstraction faite du troisième axe) comme un robot sériel. Ce qui rend le SCARA réellement spécial se cache dans la première partie de son nom: ‘Selective Compliance’, ou souplesse sélective. Plus grande est la souplesse d’un objet, plus grande est la déformation par certaines forces. La souplesse est l’opposé de la rigidité. Chaque robot a une rigidité/souplesse sélective, qui varie en fonction de l’axe. Sur un robot à six axes standard, les axes tournent dans toutes sortes de directions l’un par rapport à l’autre. Ce faisant, la souplesse varie constamment selon les mouvements du robot. Sur le SCARA, les directions XY sont plus souples que la direction Z parce que les axes des moteurs XY sont parallèles à l’axe Z. Dans la direction XY se produit une souplesse du fait que les axes comportent une certaine flexibilité consécutive à la transmission entre le moteur et le bras. Une grande souplesse dans la direction XY peut aussi être obtenue en supprimant l’assistance des moteurs. Dans certaines applications, ceci peut être un grand avantage.
TYPES et construction
Sériel
La plupart des SCARA sont exécutés sériels. Ceci veut dire que les axes se suivent. L’épaule, le coude et le poignet ont chacun un moteur. Chaque moteur ‘porte’ donc aussi les moteurs suivants comme sur les robots sériels classiques avec 5 à 7 degrés de liberté. Le moteur de l’épaule est typiquement exécuté plus grand parce qu’il doit déplacer la structure et les moteurs suivants. Cependant celui-ci doit pouvoir générer plus de couple, parce que celui-ci ‘voit’ plus d’inertie, pour pouvoir accélérer le moteur du coude à des vitesses comparables.
Parallèle
Outre les exécutions sérielles, il existe quelques exécutions parallèles. Les SCARA dits ‘double bras’ ont typiquement encore une plus grande vitesse et précision (typiquement une répétabilité d’environ 5 µm). Ces robots peuvent être comparés à deux bras humains qui se tiennent par les mains. La vitesse plus élevée résulte du placement des moteurs pour les déplacements X et Y dans la base. Les positions X et Y dans le plan sont déterminées par le mécanisme formé par les deux bras et un mouvement coordonné des deux moteurs. Il ne faut plus de moteur dans le coude. Ceci allège la structure. Un même moteur dans l’épaule du robot peut réaliser une plus grande accélération, ce qui permet au robot de se déplacer bien plus vite. Ceci va de pair avec une plus grande précision. Dans des configurations sérielles, les erreurs de positionnement du premier moteur (épaule) sont cumulées avec l’erreur de positionnement du second (coude). Ce n’est pas le cas sur les configurations parallèles parce que les deux moteurs se situent dans la base. La construction est aussi plus rigide. Le plus grand inconvénient du SCARA parallèle est la commande nettement plus complexe. Celle-ci doit éviter la collision des deux bras. Par ailleurs, il n’est pas si simple dans cette configuration de déplacer les bras dans l’espace de travail quand l’opérateur doit intervenir.
nombre d'axes
La plupart des SCARA sont livrés avec quatre axes, généralement dénommés X,Y,Z et U. Le quatrième et dernier axe autorise une rotation autour de l’axe vertical, ce qui permet de saisir et de déposer les objets sous la bonne orientation. Par ailleurs, il existe encore des versions avec seulement trois axes, ce qui ne permet pas d’effectuer la rotation de l’objet autour de l’axe vertical. Typiquement, ces modèles sont engagés quand l’outil qui est placé sur le dernier axe (Z) n’a pas besoin d’une rotation dans le plan. Songez à un SCARA avec un tournevis sur l’axe Z. Dans de telles applications, le quatrième axe est complètement superflu étant donné que le tournevis se charge de la rotation.
Quand un cinquième axe est nécessaire, ce qui peut être le cas quand une rotation hors du plan doit être donnée à l’objet, celui-ci est monté dans la plupart des cas comme un axe ajouté parce que les SCARA à cinq axes ne sont pas disponibles en standard. Actuellement, les premier et second axes du SCARA sont toujours dotés d’un servomoteur électrique. Le troisième (axe Z) était exécuté auparavant dans certains cas avec un vérin pneumatique. Maintenant ce troisième axe est toujours électrique, ainsi le mouvement vertical peut être positionné avec précision sur la portée complète de l’axe.
Généralement, le SCARA est implanté verticalement. Des versions pour le montage sur une paroi ou un toit peuvent offrir des avantages parce que des produits peuvent passer en dessous et que la base du robot ne fait pas obstacle.
Portée et portance
Tous les fabricants de robots ne proposent pas des SCARA, tandis que d’autres mettent justement l’accent sur ce type de robot. Une grande gamme de dimensions et de portances est toutefois disponible. La portance peut varier de 1 à 20 kg tandis que les longueurs de bras peuvent varier de 170 à 1.000 mm. La zone de travail du SCARA est typiquement limitée à ce qui se trouve devant la base du robot. Le SCARA est généralement posé debout. Par ailleurs, il existe des robots sur le marché avec un axe qui peut tourner pour une plage de travail entièrement cylindrique. Ce SCARA rotational est typiquement suspendu et a été lancé en réponse aux robots Delta. Un tel SCARA peut être intégré de façon plus compacte, est très précis, a une plus grande portance et a une zone de travail bien plus grande et parfaitement cylindrique. Par ailleurs, la construction ne s’use pas et le coût est aussi considérablement plus basse que celle des robots Delta avec un grand espace de travail.
avantages de SCARA
Précis et sans entretien
Sur un robot à 6 axes, la précision de la position de l’objet/outil est déterminée par la précision de chacun des axes/articulations. Plus les axes en série sont nombreux, plus cette erreur est cumulée. Etant donné qu’un SCARA ne possède que deux axes successifs, cette erreur reste limitée. Ainsi un SCARA a généralement une grande répétabilité et précision.
Rigidité raisonnable, inertie minimale
La construction du robot permet de réaliser une rigidité raisonnable avec une inertie minimale. Par ailleurs, seul un nombre limité de moteurs doit être porté pendant le mouvement. L’épaule porte deux ou trois moteurs, le coude en porte un ou deux. La faible inertie et le faible poids permettent d’effectuer des mouvements rapides/fortement accélérés dans la direction XY. Les SCARA ont donc des temps de cycle très courts.
Prix
Le prix du SCARA est très compétitif par rapport à celui des robots Delta et des robots sériels.
Plage de travail
Grande par rapport à l’empreinte en comparaison des robots Delta.
Programmation simple
Le désaccouplement du mouvement XY (deux moteurs en configuration planaire) et le mouvement Z font que la programmation du robot est simple et très intuitive. Par ailleurs, le concept ‘deux liens’ se laisse aisément programmer parce que le robot se déplace de façon très intuitive et montre une forte analogie avec la façon dont le bras humain se déplace dans un plan.
Grande rigidité dans la direction Z
Fait que les SCARA peuvent être engagés pour des applications nécessitant une force de compression, songez à l’ajustement par compression des axes dans les roulements. Une force de compression de 200 N peut être fournie sans dégâts.
Souplesse sélective
Lorsque les moteurs XY ne sont pas assistés, le robot est souple dans la direction XY tandis que ceci n’enlève rien à la grande rigidité dans la direction Z. Ceci peut être très pratique pour des applications ‘tenon dans mortaise’ ou de compression. Au cours de la descente de l’axe z, les moteurs XY sont stoppés tandis que les encodeurs restent assistés. La souplesse dans la direction XY est idéale pour compenser de façon passive les erreurs de tolérance, surtout quand les éléments sont dotés d’un chanfrein.

inconvénients de SCARA
Nombre de degrés de liberté limité
Lorsqu’une manipulation complexe de la pièce/objet est par exemple nécessaire (par exemple rotation hors du plan), des axes supplémentaires doivent être prévus.
L’axe Z est généralement l‘axe le plus lent
Par ailleurs, celui-ci doit aussi se déplacer quatre fois dans un seul cycle tandis que les axes X et Y doivent seulement se déplacer deux fois. Cela limite la portée de l’axe Z. Par ailleurs, la plus grande précision du SCARA est obtenue dans le déplacement X et Y. Lorsque le déplacement dans la direction Z s’effectue sur de grandes distances, cet axe subit une plus grande flexion consécutive aux forces de processus. Ce faisant, la précision décroît. La portée de l’axe Z doit donc être limitée, ce qui peut être un inconvénient dans certaines applications.
Applications
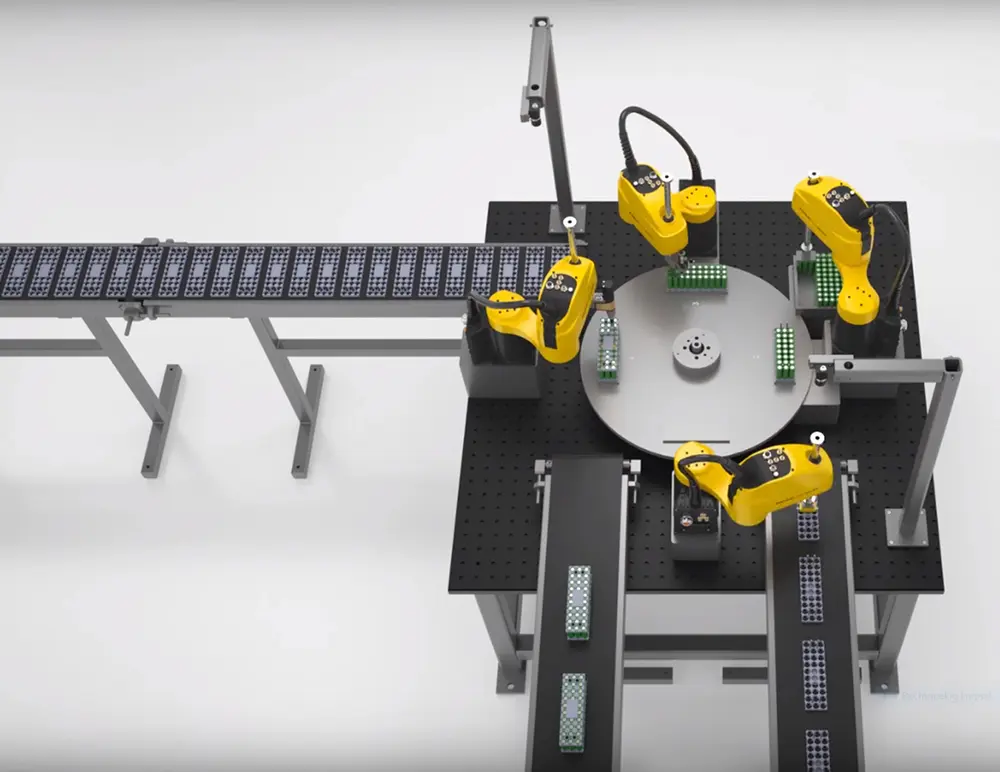
Les SCARA sont conçus comme robots d’assemblage là où le sens de montage se situe toujours dans le plan. Généralement, les SCARA sont aussi engagés pour l’assemblage de l’électronique, des pièces moulées par injection, des connecteurs, des commutateurs et des prises électriques, des balais d’essuie-glace, des capteurs, des pièces médicales telles que les lentilles de contact et les contraceptifs, de l’éclairage LED … Par ailleurs, les SCARA sont engagés pour emballer, le pick and place, la manipulation de matériaux, l’étiquetage et l’exécution de contrôles de qualité. Ils sont généralement moins utilisés dans les applications nécessitant des déplacements rapides et précis dans le sens vertical.
CRITERES DE CHOIX
Quelques questions sont à prendre en compte dans le choix d’un SCARA. L’espace de travail et la portance sont-ils suffisants? 3 ou 4 axes suffisent-ils pour l’application visée? Un grand déplacement dans la direction Z est-il nécessaire? Quels sont le temps de cycle et la répétabilité désirées?
