Palletisers KUNNEN producten automatisch STAPELEN
ROBOT EN GRIJPER AFHANKELIJK VAN SPECIFIEKE TOEPASSING

Het stapelen van verpakte levensmiddelen in een vast patroon op een pallet is een repetitieve en belastende taak, die u gerust uit handen van uw medewerkers kan nemen. Palletisers zijn robots die specifiek ontworpen zijn voor deze werkzaamheden, maar er bestaan ook andere automatiseringsoplossingen. De juiste keuze van robot, grijper en software hangt af van de beoogde toepassing.
Plaats in het productieproces

De redenen om bepaalde taken in het productieproces te automatiseren, kunnen velerlei zijn. Robots kunnen in alle veiligheid belastende werkzaamheden uitvoeren, in koude werkomgevingen, op een constante wijze en zonder uitval. Op die manier kunnen ze ook een oplossing bieden bij personeelstekorten, of kunnen ze worden ingezet om de concurrentie met lagelonenlanden aan te gaan. Daarbij kunnen uw medewerkers hun menselijke troeven dan beter uitspelen bij andere taken.
Verpakking
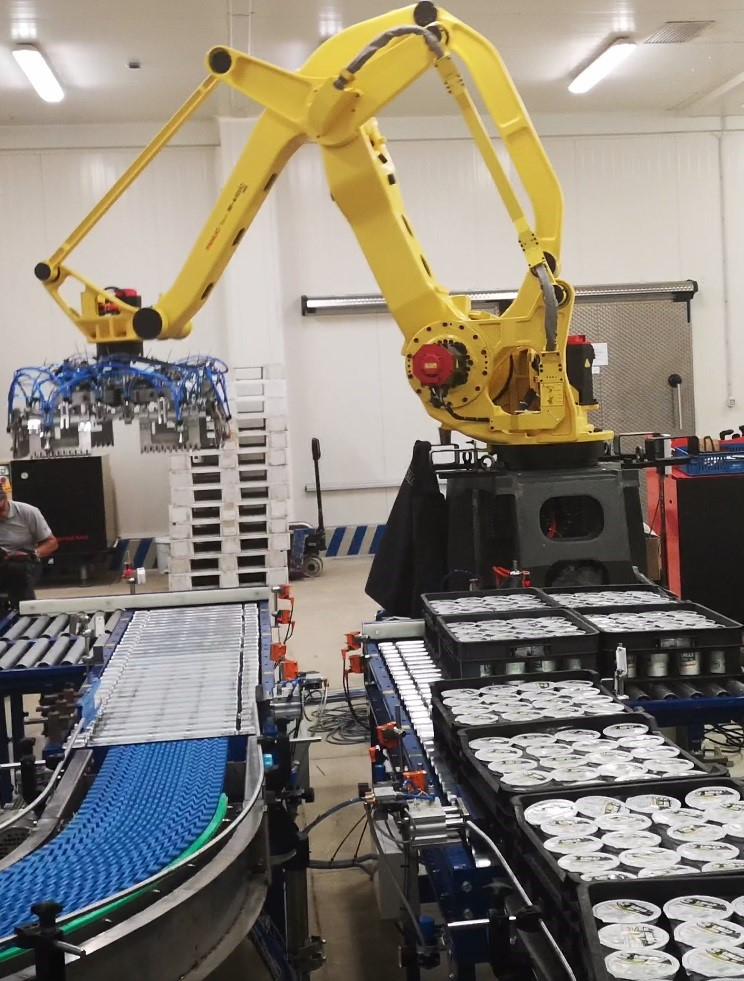
Ook in het verpakkingsproces zijn er verschillende stappen die je met robots kan automatiseren. Zo kunnen pick & place-robots willekeurig aangevoerde producten sorteren en schikken, en het eigenlijke verpakken kun je overlaten aan een packaging-robot. Palletisers komen nog een stap later in zicht. Die dienen namelijk om de gesloten verpakkingen vast te grijpen en ze daarna volgens een vast patroon - eventueel enkele lagen hoog - op een pallet te stapelen; klaar voor transport.
Maar in welke robotinstallatie investeert u nu best?
AANDACHTSPUNTEN EN Keuzefactoren
Gewicht
De eerste vraag die u zich daarbij moet stellen, is welk gewicht er moet worden getild. Daar zal natuurlijk een robot met de juiste payload tegenover moeten staan. Ook de dynamische belastingen die de grijper met producten op de handassen van de robot veroorzaakt, moeten worden bepaald.
Beschikbare ruimte
Ook belangrijk is de beschikbare ruimte in de verpakkingshal. Denk daarbij niet alleen aan de horizontale én verticale bewegingen van de robot zelf, maar ook aan het eventuele hekkenwerk en de aan- en afvoerende transportbanden daarrond. De 'werkplek' van een robot moet dus veel groter zijn dan zijn eigenlijke reikwijdte.
Snelheid
Voorts moet er rekening worden gehouden met de beoogde cyclustijd. Zorg ervoor dat de robot de juiste snelheden en versnellingen voor de verschillende bewegingen kan halen. Dit kan worden geverifieerd via een simulatie.
Vorm
Tot slot zijn ook de vorm en afmetingen van de te behandelen producten van belang, en dan vooral voor de grijperkeuze (zie verder). Gaat het om dozen, kratten, bakken, emmers, zakken, vaten ... ?
Ook cobots worden steeds vaker ingezet voor palletiseertaken
Robottype
Industriële robot
Palletisers zijn specifiek ontworpen voor het grijpen, transporteren en stapelen van producten. Ze onderscheiden zich door de hoge snelheden en de sterke handassen, om zo ook grotere grijpers zonder problemen te kunnen bewegen. Ze hebben daartoe 4 of 5 assen en staan dikwijs op een sokkel gemonteerd. Indien er naast de roterende beweging van de robotpols ook een kantelbeweging nodig is bij het stapelen, kan een 6-assige industriële robot soelaas bieden.

Cobot
Cobots zijn bedoeld om met de mens samen te werken in de productie-omgeving en worden ook steeds vaker voor palletiseertaken ingezet, als tilhulp. Door hun opzet is er geen hekkenwerk vereist, waardoor ze een compacte oplossing kunnen zijn voor wie maar een beperkte ruimte ter beschikking heeft. Anderzijds zijn cobots uit veiligheidsoverwegingen beperkt in payload, werkbereik en snelheid.
Grijper
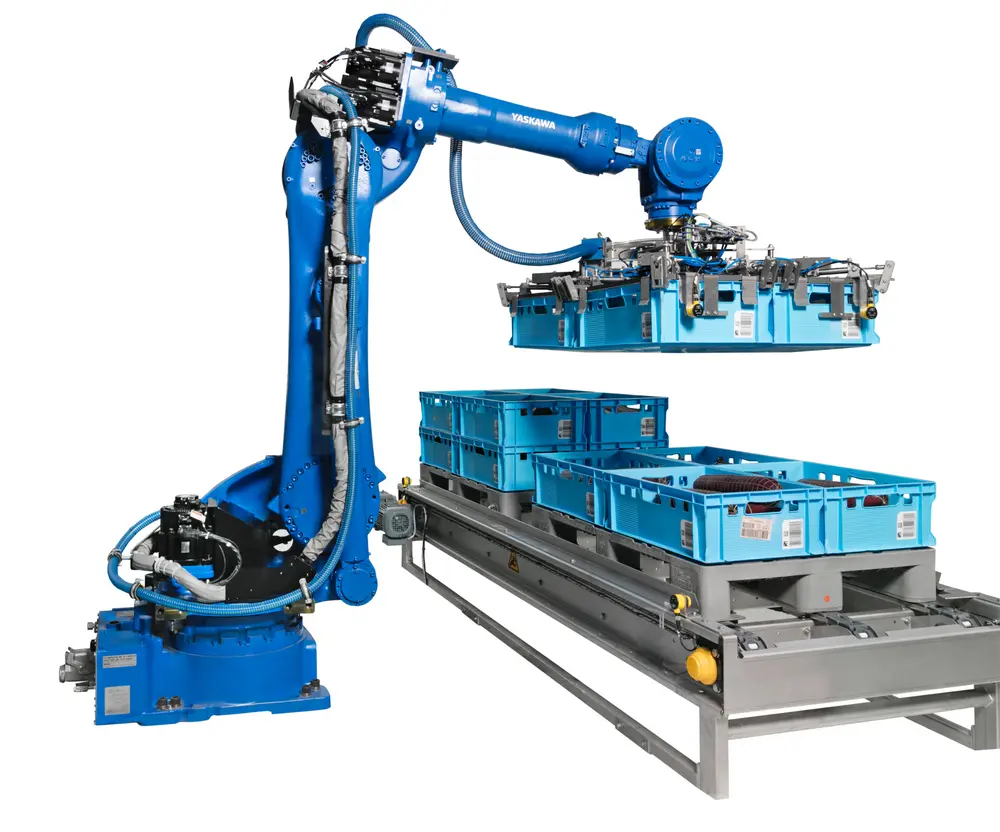
Naast de eigenlijke robot, is ook de juiste grijper aan de robotarm van groot belang. Die kan mechanisch of pneumatisch werken, naargelang de aard van het te grijpen product. Soms worden ook meerdere producten tegelijk vastgegrepen en op de pallet geplaatst. Er bestaan hiervoor standaardoplossingen, ofwel kan de systeemintegrator een grijper op maat ontwikkelen.

Naast de eigenlijke verpakkingen, kan de robot desgewenst ook een tussenvel plaatsen, of zelfs een lege pallet klaarleggen. Dit kan eventueel met één en dezelfde grijper, die dan natuurlijk wel moet afgestemd zijn op die bijkomende taken.
Besturing
Robotfabrikanten zetten in op het gebruiksgemak bij het ontwikkelen van hun besturingssoftware. Voor het eigenlijke stapelproces kunnen eenvoudig patronen worden geselecteerd of gegenereerd, op basis van de productafmetingen en het gewenste aantal lagen. Vervolgens zal de software niet alleen het patroon aanmaken, maar ook het robotprogramma, zodat het stapelen volgens de meest efficiënte volgordes en bewegingen wordt uitgevoerd.
Bijzondere vereisten in de voedingsindustrie
- Veiligheid is een belangrijk aandachtspunt bij het ontwerpen en realiseren van elke robotinstallatie, ongeacht de industriële tak waarin die wordt ingezet. Er zijn internationale normen beschikbaar voor zowel robot- als cobotsystemen en de wetgever vereist dat die worden toegepast. Robotfabrikanten en systeemintegratoren kunnen hierbij adviseren.
- Er bestaan 'foodgrade' robots en cobots, voor gebruik in de eigenlijke productie. Gezien een palletiser echter helemaal op het einde van het productieproces wordt ingezet en alleen in contact komt met reeds verpakte producten, zijn er hiervoor geen bijzondere vereisten naar voedselveiligheid toe.
- Robots kunnen perfect werken in omgevingen tot 0 °C. Vriestemperaturen kunnen wel een extra uitdaging vormen. Hiertoe kan de robot worden uitgerust met een robothoes.
CONCLUSIE
Palletisers zijn zoals gesteld specifiek ontworpen voor palletiseertaken. Wie dit proces wil automatiseren, moet echter in de eerste plaats kijken naar de te verhandelen producten. Voor sommige toepassingen zal zo'n 4- of 5-assige palletiser niet nodig zijn en volstaat een cobot, terwijl andere gevallen dan weer om een 6-assige industriële robot vragen.
Met medewerking van Fanuc en Yaskawa









