
Ultrasoonsensoren meten meer dan afstand
En fungeren als belangrijke databron voor onder meer voorspellend onderhoud
Traditioneel worden ultrasone afstandssensoren ingezet als 'eenvoudige' detectie-elementen. Door de opkomst van IO-Link, embedded computing en snellere sensorelektronica zijn er in de huidige tijd aanzienlijk meer mogelijkheden. De sensoren evolueren als het ware naar intelligente meetpunten die actief bijdragen aan diagnose, parametrisatie en procesoptimalisatie.
Eerste commerciële ultrasone sensoren
Sensoren die werken op basis van het ultrasone principe bestaan al behoorlijk lang. De basis voor dit type sensoren werd al aan het begin van de vorige eeuw gelegd en eigenlijk nog iets eerder toen aan het einde van de 19e eeuw het piëzo-elektrische effect werd ontdekt.
Vlak na WOI was de eerste sensor een feit terwijl het begin van WOII het startpunt was van de eerste commerciële ultrasone sensoren. Deze werden ingezet voor het detecteren van scheuren en het meten van materiaaldikten. Hierna volgde de consumentenmarkt waar het ultrasone principe onder meer werd ingezet om de afstand tot een onderwerp te bepalen. Hiermee konden automatisch scherpe beelden worden gegenereerd met onder meer de Polaroid-camera met autofocus.
Werkingsprincipe
Ultrasoon (of ultrageluid) is de term die gebruikt wordt voor trillingen met een hogere frequentie dan 20.000 Hertz (20 kHz). Het zijn in die zin geen geluidsgolven meer aangezien het menselijk oor niet in staat is deze trillingen te detecteren. Deze ultrasone trillingen zijn in een ultrasone afstandssensor te gebruiken om contactloos afstanden te meten.
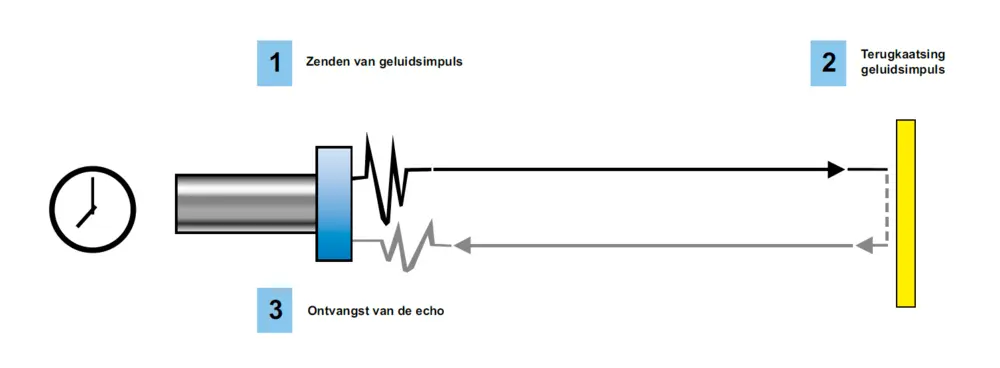
Het principe is eenvoudig: de sensor zendt ultrasone geluidsgolven uit die zich voortplanten door de lucht totdat zij tegen een object aankomen. Hierdoor botsen de geluidsgolven, keren ze terug en worden ze door de sensor opgevangen. De tijd die nodig is voor de golven om terug te keren is om te zetten naar de afgelegde afstand.
De nauwkeurigheid van ultrasone afstandssensoren wordt bepaald door het te meten oppervlak en de omgevingscondities
Kijken we iets dieper in het werkingsprincipe dan berust de werking op het omzetten van de ultrasone signalen naar (meestal) elektrische signalen conform het eerdergenoemde piëzo-elektrische effect. Ultrasoonsensoren worden overwegend als diffuse sensoren ingezet waarvoor zij continu van zend- naar ontvangstmodus schakelen.
Daarnaast zijn ze beschikbaar als zender-ontvanger of retroreflectieve sensoren. De reikwijdte van ultrasoonsensoren wordt bepaald door de golflengtes of frequentie. Hiermee is de signaalreikwijdte proportioneel met de golflengte. Zo zijn met kleinere golflengtes in het millimeterbereik detectieafstanden van 300–500 mm te detecteren. Grotere golflengtes van 5 mm zijn daarentegen geschikt voor reikwijdtes van meer dan 8 m. Door extra maatregelen is het detectiebereik uit te breiden naar afstanden tot ongeveer 8 m en met radarsensoren nog veel verder.
Randvoorwaarden
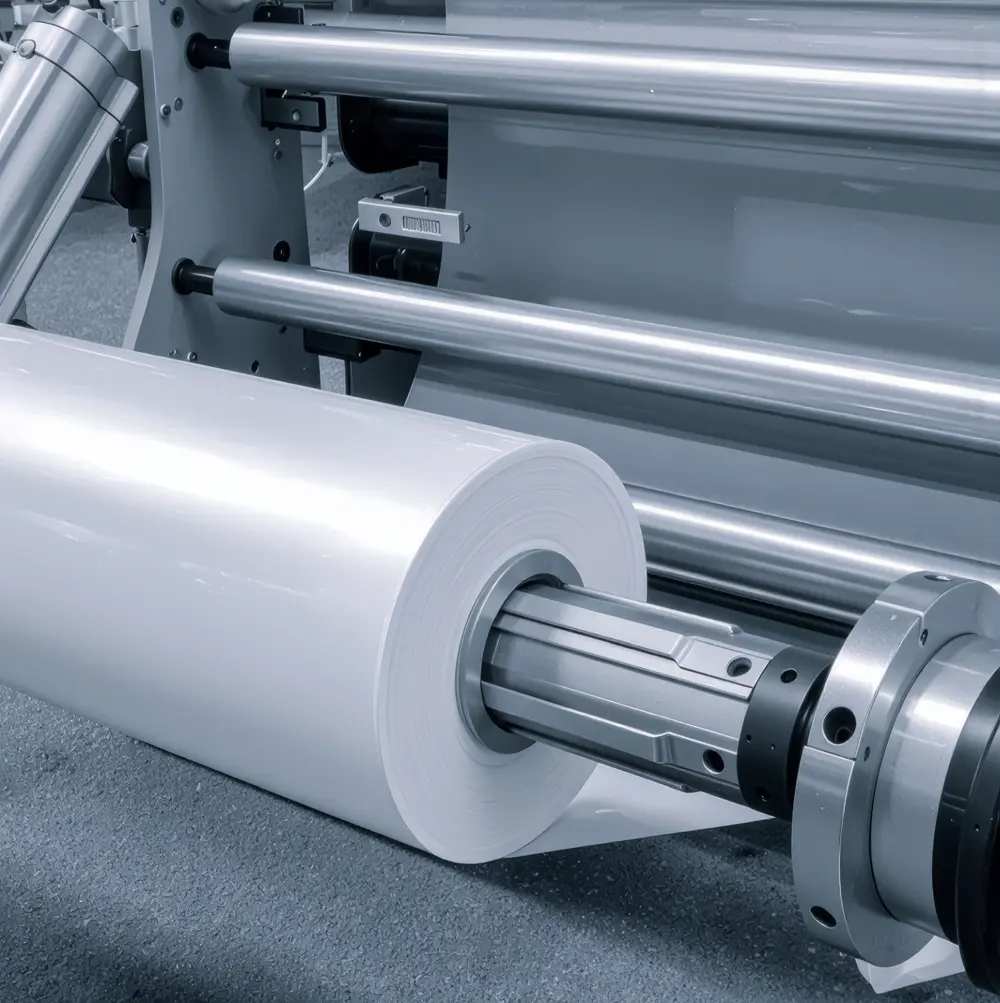
Om een juiste meting te kunnen doen, is het noodzakelijk dat aan enkele randvoorwaarden wordt voldaan. Zo is het belangrijk dat de sensoren meten op een zo glad en vast mogelijk oppervlak om de juiste reflectie te verkrijgen. Hiermee zijn ze ook geschikt voor het meten van vloeistoffen die het geluid net zo weerkaatsen als vaste, gladde voorwerpen. Dat impliceert overigens ook direct dat elke invloed uit de omgeving een verstorend effect kan hebben op de meting.
Dit begint al bij het feit dat de werking van ultrasone afstandssensoren is gebaseerd op het uitzenden en ontvangen van signalen in de normale omgevingslucht. Deze bepaalt immers de snelheid waarmee de ultrasone golven zich voortplanten. De temperatuur van de lucht, drukverschillen, luchtstromingen en luchtvochtigheid hebben derhalve invloed op de nauwkeurigheid van de meting. Voor veel van deze factoren beschikken de sensoren over compensatiemogelijkheden.
Ook zijn in industriële omgevingen grote 'stoorzenders' denkbaar zoals stof of waterdruppeltjes. Verder zijn ruwe materialen of schuimstoffen door het oppervlak minder geschikt omdat deze in staat zijn de geluidsgolven (gedeeltelijk) te absorberen.

In tegenstelling tot sensoren die werken op basis van licht hebben ultrasone afstandssensoren geen 'last' van de kleur van een oppervlak en zijn ze ook uitstekend in staat om betrouwbaar te weerkaatsen op doorzichtige voorwerpen. De temperatuur daarentegen heeft wél invloed op de werking aangezien hete oppervlakken het ultrasone geluid slechter reflecteren dan koude oppervlakken.
Grofweg bestaan er twee typen ultrasoonsensoren. In het ene type is een ultrasoonbereiksysteem gebaseerd op een ingebed apparaat of een microcomputer met één chip. Bij de tweede uitvoering betreft dit een CPLD (Complex Programmable Logic Device).
Toepassingen
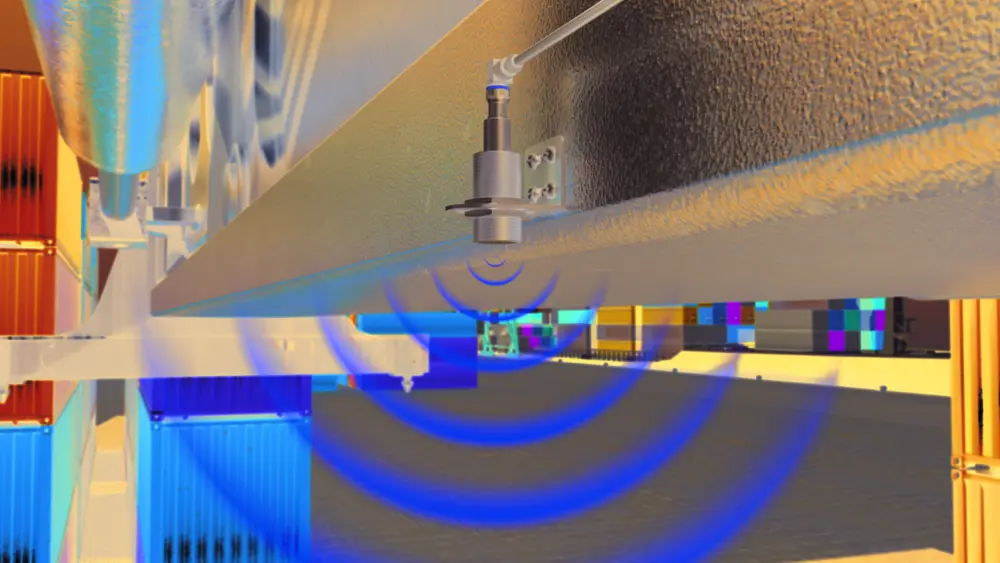
Door het relatief nauwkeurige meetprincipe (1–3% van het meetbereik dat gemiddeld zo’n 2–400 cm bedraagt) zijn de sensoren geschikt voor uiteenlopende doeleinden. Binnen de motion control worden ze bijvoorbeeld ingezet voor obstakelvermijding door robots of cobots maar ook voor controle- en kwaliteitsdoeleinden waarbij bijvoorbeeld aanwezigheid wordt gedetecteerd. In weer andere industrieën worden ze gebruikt voor het bepalen van een vloeistofniveau, putdiepte, lengte van pijpleidingen en in AVG’s. Daarbij liggen grote voordelen in het feit dat de sensoren contactloos en dus slijtagevrij meten.
Naast het meten van afstanden en het detecteren van objecten – waarmee ook tellen tot de mogelijkheden behoort – zijn de sensoren ook te gebruiken voor bepaalde vormen van snelheidsmetingen. Deze is te berekenen door te kijken hoe snel de afstand tussen de sensor en het object verandert. Het combineren van verschillende sensoren maakt het bovendien mogelijk om afmetingen te bepalen waarmee ook volumes van objecten zijn te berekenen.
Moderne ontwikkelingen
Vooral ontwikkelingen op het vlak van communicatietechnologie hebben de toepassing van feitelijk alle sensoren op een hoger niveau gebracht. Dit geldt ook voor ultrasone afstandssensoren. Speciale nadruk leggen we op het communicatieprotocol IO-Link. Deze wereldwijd gestandaardiseerde IO-technologie is ontwikkeld voor de digitale communicatie tussen besturingssystemen en sensoren of actuatoren 'in het veld'. Point-to-point.
Waar ultrasone afstandssensoren niet meer toereikend zijn in verband met de te overbruggen afstand of omgevingscondities, bieden radarsensoren eventueel uitkomst
Bijzonder daarbij is dat IO-Link drie typen data kan versturen: procesdata, servicedata en diagnosedata. Procesdata betreffen de feitelijke meetdata van de sensoren die in dit geval in de meeste gevallen over afstand zullen gaan. Omdat er bovendien digitaal wordt gecommuniceerd, zijn er geen analoge verliezen. Ook zijn problemen met 'ruis' als gevolg van het gebruik van lange kabels niet aan de orde.

Servicedata zijn de gegevens van het apparaat zelf; het apparaat stelt deze beschikbaar aan de besturing in verband met bijvoorbeeld kalibratie maar biedt bovenal voordelen bij het uitwisselen van de sensor, bijvoorbeeld wanneer deze kapot is. Benodigde instellingen van de sensor zijn dan al beschikbaar in de besturing zelf.

Verder zijn via IO-Link naar wens ook zaken als de geluidskegel softwarematig aan te passen of zijn schakelpunten en meetbereiken op afstand in te stellen. Dit is zeker een voordeel wanneer de betreffende sensor op een moeilijk toegankelijke plaats is geïnstalleerd.
De diagnosedata tot slot spelen vooral een rol in het onderhoud van de betreffende sensor. Zo is condition-based maintenance te baseren op bijvoorbeeld het aantal bedrijfsuren of zijn andere gegevens te gebruiken voor voorspellend onderhoud. Bijvoorbeeld de interne temperatuur van een sensor.
Edge computing
Tot slot doen ultrasone afstandssensoren volledig mee in de trend van edge computing. Hiervoor beschikken de sensoren zelf over de nodige 'intelligentie' waarmee ze data lokaal kunnen verwerken en eventueel zelfstandig (snelle) beslissingen kunnen nemen. Dit laatste is onder meer van belang wanneer de sensoren worden ingezet om robots te navigeren en daarbij botsingen te voorkomen. Door het ter plekke verwerken van de data is een robot direct aan te sturen en zijn botsingen te voorkomen die mogelijk wel optreden wanneer er moet worden gewacht op een signaal vanuit de besturing of cloud.
Waar IO-Link een veldbusprotocol is voor een point-to-pointcontact, zijn de sensoren ook te betrekken in bredere open communicatieprotocollen waarbij informatie wordt uitgewisseld tussen machines en IT-systemen. Gaat het om de communicatie van data naar clouds en IoT-dashboards, dan worden vaak de protocollen MQTT (Message Queuing Telemetry Transport) en OPC UA (Open Platform Communications Unified Architecture) gebruikt.
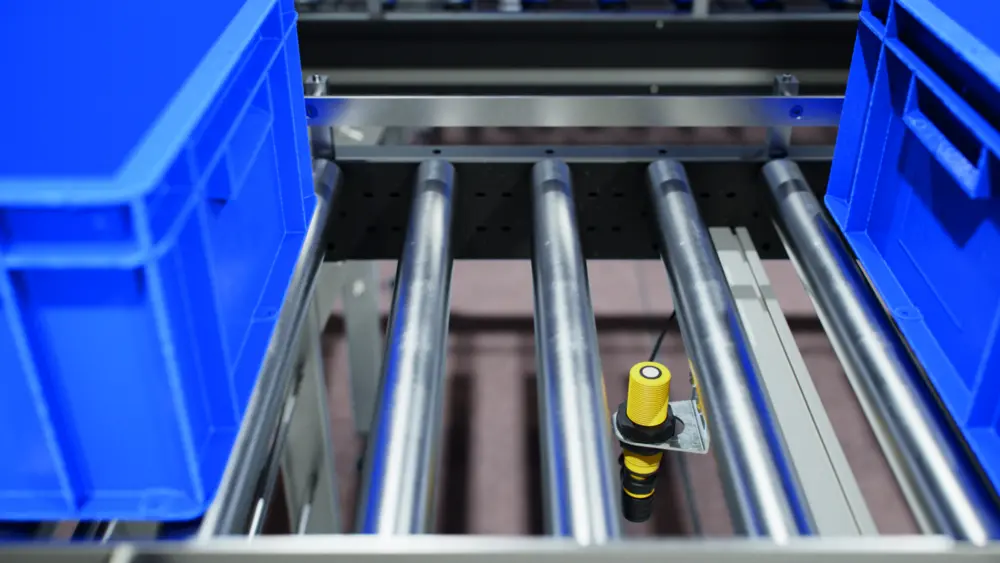
en deze eventueel ook direct kan tellen (foto: Turck)
en deze eventueel ook direct kan tellen (foto: Turck)

en deze eventueel ook direct kan tellen (foto: Turck)
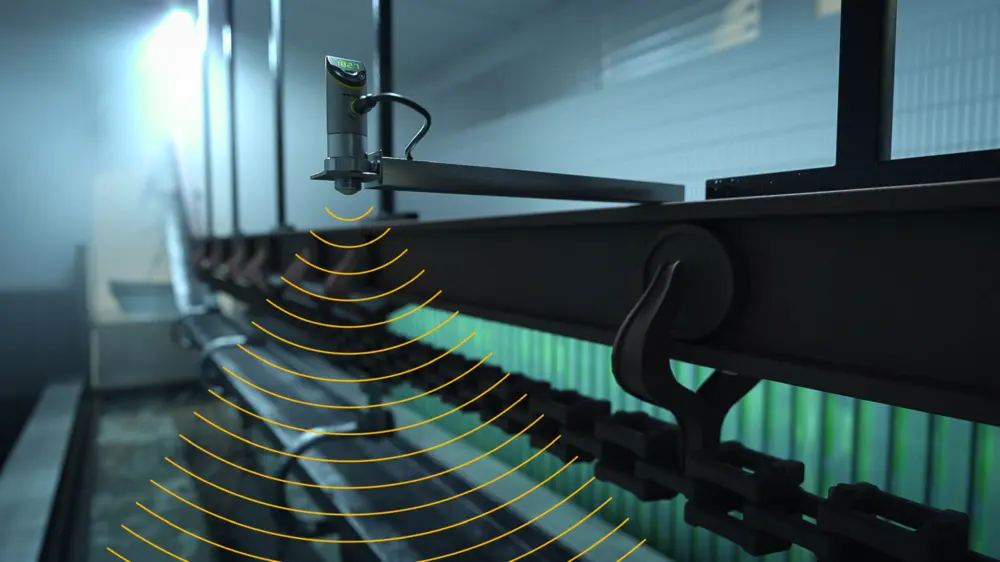
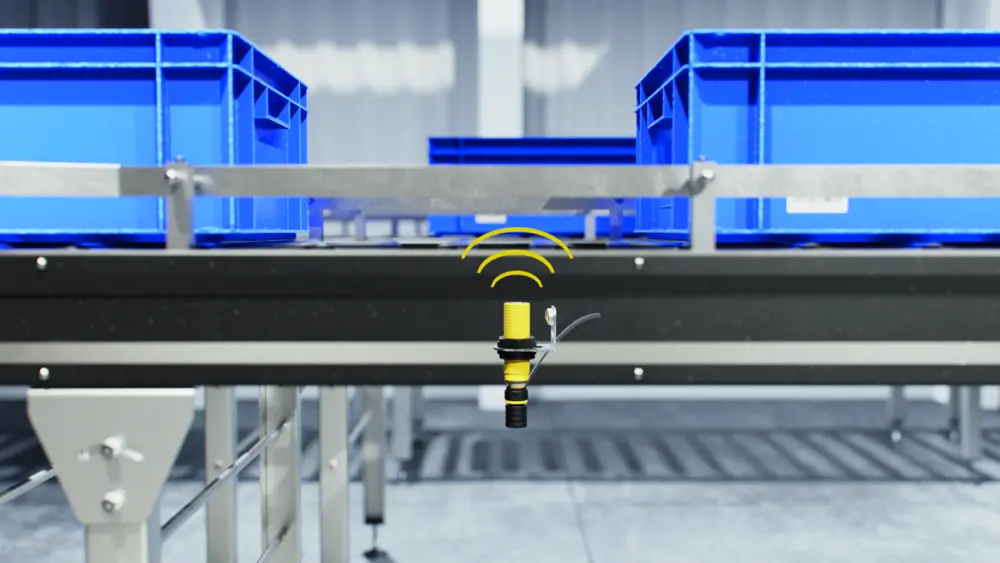
Een veelgebruikte functie van edge computing is ook voor ultrasone afstandssensoren van toepassing en betreft het verzamelen van veel data en het filteren van relevante metingen. Wanneer deze sensoren worden ingezet om te controleren of alle elementen op een transportband aanwezig zijn, dan hoeft de hoofdbesturing bijvoorbeeld pas een signaal te ontvangen wanneer een element ontbreekt. Alle ‘goed’-metingen zijn voor hem niet relevant en kunnen in de sensor zelf weer worden verwijderd. Dat kan een belangrijke ontlasting voor de hoofdbesturing betekenen.
MQTT is vooral een oplossing wanneer de focus ligt op flexibiliteit – bijvoorbeeld als de data naar een mobiele app of een webdashboard in de cloud worden gestuurd. In het tweede geval worden data vanuit de sensor verstuurd met context; dus bijvoorbeeld met de eenheid van de meting erbij of met een beoordeling ‘goed’ of ‘niet goed’. Hiermee is hij vooral geschikt wanneer de data moeten worden geïntegreerd in een professionele productieomgeving waarbij vooral betrouwbaarheid en beveiliging een rol spelen.
Met medewerking van AE Sensors, IFM, Krohne, Lauman, Sensor Partners, Sick en Turck