
Les robots de prise et de dépose sont de plus en plus capables de gérer les variations

Grâce à l'intégration des systèmes de vision et de l'intelligence artificielle, la technologie de prise et de dépose (pick-and-placve) passe d'une tâche d'automatisation relativement simple à un système intelligent capable de gérer les variations des produits naturels. Par conséquent, les robots peuvent désormais reconnaître et traiter des produits alimentaires variables et irréguliers.
Les moteurs de l'évolution
Le cœur actuel de l'automatisation dans le secteur de la transformation alimentaire est typiquement le robot de prise et dépose, caractérisé par des applications répétitives et simples. Pensez, par exemple, à des produits qui sont prélevés sur un convoyeur et déposés dans un emballage, ou à des produits qui sont disposés et déposés d'un convoyeur, sur lequel ils occupent une position et une orientation aléatoires, sur plusieurs convoyeurs de manière structurée.
Toutefois, la recherche générale d'une plus grande productivité et d'une meilleure rentabilité se traduit par une demande croissante d'automatisation dans des applications où la flexibilité et la robustesse de la robotique sont primordiales, allant ainsi au-delà de l'application classique de saisie et de dépose. Il suffit de penser aux robots qui peuvent être utilisés pour manipuler des aliments délicats sans les endommager, tout en conservant une vitesse et une robustesse suffisantes.
En outre, le secteur alimentaire est confronté à des défis tels que l'augmentation du coût de la main-d'œuvre et la pénurie de travailleurs. Cette situation entraîne un besoin d'automatisation et pose également des défis quant aux compétences et à la flexibilité nécessaires à l'automatisation. Dès lors qu'il faut faire preuve d'une plus grande dextérité, de créativité ou d'une grande variété de tâches, les systèmes actuels semblent souvent trop limités.
Cependant, les récents développements en matière de robotique guidée par la vision, de préhenseurs souples, de technologie robotique "food-safe" (apte au contact alimentaire) et d'intelligence artificielle rendent les robots de plus en plus capables d'effectuer des opérations complexes. Nous présentons ci-dessous quelques évolutions en termes de technologie et d'application pour les robots de prise et de dépose dans l'industrie alimentaire.
Chiffres clés de la robotique dans l'industrie alimentaire
Le "Food and beverage" (l;e secteur de l'alimentation et des boissons) reste un petit marché pour la robotique (± 4%) comparé à d'autres grands secteurs, tels que l'électronique et l'automobile. Toutefois, on observe une tendance à la hausse en 2024 par rapport à 2022 (3 à 4% de part de marché et une augmentation de plus de 30% du nombre d'installations robotisées dans le secteur F&B). En revanche, on observe un léger déclin dans les grands secteurs.
Nouvelles applications
Identification et tri
Un premier grand segment classique de la robotique dans l'industrie alimentaire consiste à prélever et à placer des aliments sur une bande transporteuse, par exemple. On constate ici une évolution de l'obtention de la position sur la bande pour le prélèvement vers l'identification, la classification et le tri par la détection, par exemple, de la couleur, de la taille, de la forme, des défauts... Ceci à l'aide de systèmes de vision qui peuvent être entraînés à partir d'un grand ensemble d'images ou d'un mélange de données artificielles et réelles.
Par exemple, pour créer des données artificielles, on peut utiliser l'IA générative pour introduire des défauts dans des images d'aliments de manière aléatoire, afin d'obtenir un grand ensemble de données sur lesquelles entraîner les algorithmes. Cette identification permet de détecter les problèmes de qualité ou les contaminations et de procéder à un tri sélectif. Ainsi, les produits de mauvaise qualité peuvent être triés sur la base de leur couleur, de leurs taches, de leur maturité, etc. Pensez au triage des mauvais oignons, ou à la reconnaissance du type de praline pour les trier dans le bon emballage.

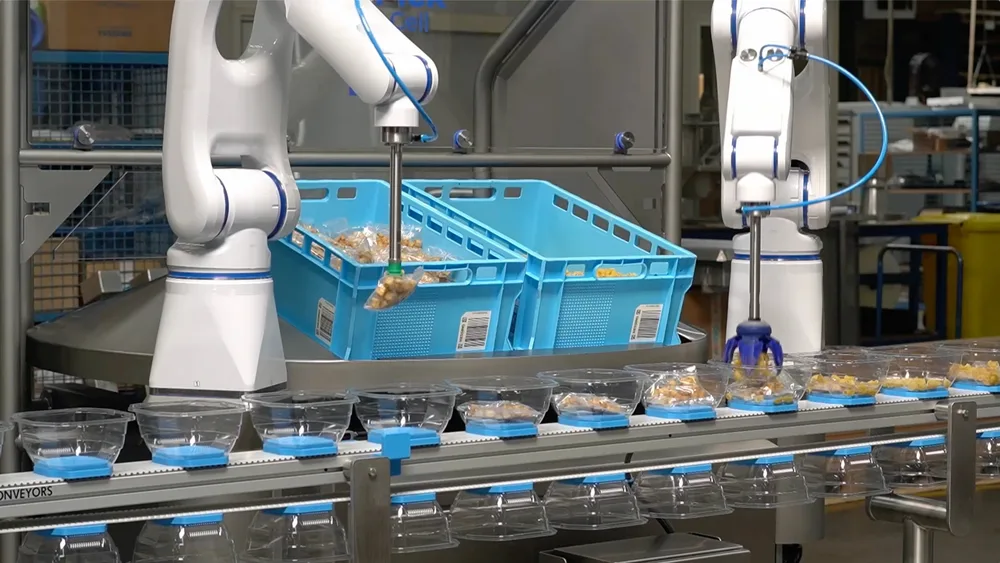
En outre, les progrès réalisés dans d'autres secteurs en matière de "bin-picking" (dévracage) et de vision 3D pourraient également permettre aux robots alimentaires de prélever directement des produits en vrac. Il ne serait alors plus nécessaire d'étaler les produits sur un large tapis roulant, ce qui permettrait aux robots de prélever des produits dans des bacs.
Assemblage des repas et portionnement
Alors qu'auparavant les aliments étaient généralement acheminés d'une bande transporteuse vers un emballage quelconque, on assiste à une évolution vers l'assemblage et le portionnement de repas préparés, tels que des emballages frais ou des repas déjà préparés. Une fois de plus, les aliments sont acheminés vers un emballage, mais on va réunir un mélange de différents types d'aliments dans un même emballage.
Cela pose évidemment des défis supplémentaires. Pensez au transport de différents éléments jusqu'au robot, ou à la distinction entre ce qui est automatisable et ce qui est encore fait par l'homme. En outre, cette application posle également des défis supplémentaires à la technologie robotique et aux préhenseurs, par exemple lorsqu'il s'agit d'extraire certains aliments d'un grand récipient. En fonction du type d'aliment, différents systèmes robotiques (sériel, delta...) et préhenseurs seront utilisés, par exemple pour prélever du riz ou saisir un hamburger.

Quelques acteurs proposent déjà une solution robotique qui promet un temps de changement rapide et un portionnement précis. Les développements se concentrent sur l'automatisation des opérations humaines dans ces applications. Il existe sur le marché des systèmes capables de gérer différents types de plateaux et peut-être même de prendre en compte les cas où ils ne sont pas bien positionnés. La perception et l'intelligence artificielle joueront un rôle important à cet égard.
Dans l'idéal, ces systèmes peuvent gérer les variations et toujours assurer un portionnement et un positionnement précis. Le suivi des données (poids, images de la caméra...) de chaque portion et l'introduction d'un comportement d'auto-apprentissage basé sur ces données seront importants à cet égard. Les efforts se concentrent sur la possibilité d'éviter le sous-portionnement et le sur-portionnement. Le rôle du travailleur passe de l'exécution d'un travail répétitif à la supervision et à l'ajustement de ce travail.
Dans les applications complexes, les ingrédients d'un hamburger sont empilés, ou les ingrédients sont placés sur une pizza
Outre les exemples ci-dessus, où les ingrédients sont rassemblés dans un seul emballage, nous voyons également des applications plus complexes où les ingrédients sont effectivement empilés. Il s'agit, par exemple, d'empiler les ingrédients d'un hamburger ou de placer des ingrédients sur une pizza.
Pick-and-place de la viande et du poisson
La manipulation de la viande et du poisson présente des défis typiques. En effet, ces produits sont difficiles à manipuler parce qu'ils sont déformables et lisses, et que leur taille et leur géométrie ne sont pas uniformes. Les progrès réalisés dans le domaine de la vision 2D et 3D, des robots "foodgrade" (voir ci-dessous) lavables et adaptés à la transformation de la viande, et la mise au point de pinces souples ou spéciales pour la manipulation des produits carnés permettent d'utiliser des robots dans ce type d'applications.
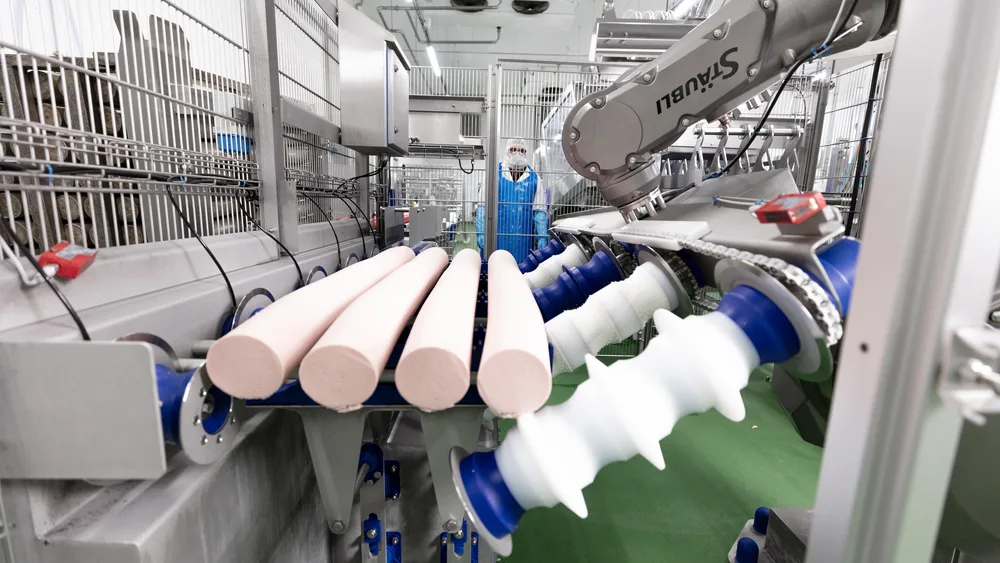
Le prélèvement d'ailes de poulet en vrac à l'aide de pinces souples et d'un système de vision 3D. La conception de préhenseurs spéciaux pour des applications spécifiques est également au centre de l'attention. Il suffit de penser au prélèvement de saucisses à l'aide d'un robot.
Avancées technologiques
Les progrès technologiques en matière d'applications de prise et de dépose dans l'industrie alimentaire se situent dans plusieurs domaines.
Cobots
Dans certaines applications où il n'est pas nécessaire d'atteindre des temps de cycle élevés et où des complexités très spécifiques sont attendues, il est possible d'utiliser des cobots. De cette manière, les tâches peuvent être réalisées sous la supervision d'un être humain. En outre, les cobots sont souvent utilisés dans des applications de fin de ligne, telles que la palettisation.
Systèmes de vision
L'identification et la manipulation précises des aliments (détermination de la qualité, de la position sur la bande, etc.) permettent aux mêmes robots d'effectuer un plus grand nombre de tâches: de la simple prise et dépose au tri, par exemple. L'évolution des systèmes de vision 2D et 3D offre un large éventail de possibilités.
Préhenseurs spéciaux
Les développements réalisés dans la technologie de préhension ouvrent de nouvelles possibilités d'application. Les préhenseurs à vide sont largement utilisés dans les applications simples de prise et de dépose. En outre, une grande attention est accordée au développement de préhenseurs souples permettant des manipulations plus complexes, telles que la saisie d'un oignon sur un convoyeur après qu'il a été classé comme "à retirer" par un système de vision. Pensez à des préhenseurs conçus comme des doigts humains qui permettent de manipuler des produits délicats et organiques de différentes formes. Enfin, des préhenseurs sur mesure sont également conçus pour des applications spécifiques.
L'intelligence artificielle
Les développements dans l'intelligence artificielle promettent une meilleure perception et une plus grande robustesse grâce à leur comportement d'apprentissage, ainsi qu'une programmation plus simple.

Types de robots
- Le robot "pick-and-place" le plus connu est probablement le robot delta, dont les moteurs sont tous situés à la base et reliés à l'effecteur final par des bras légers. Grâce à leur construction, ces robots sont très rapides et parfaits pour les applications impliquant des produits légers, comme la prise de biscuits ou de chocolats sur un convoyeur.
- Les robots SCARA se composent d'une série de deux axes de rotation verticaux. En outre, il faut prévoir un troisième axe linéaire qui effectue le mouvement vertical pour prendre et déposer les objets. Dans certains cas, pour les objets non symétriques, un quatrième axe de rotation est prévu dans le poignet, qui peut fournir une orientation autour de la perpendiculaire au plan. Une telle construction permet un mouvement horizontal très rapide et précis, au cours duquel une certaine force peut également être exercée. Dans l'alimentation, les robots SCARA sont principalement utilisés pour des applications de prise et de dépose rapides.
- Les robots portiques sont constitués d'une chaîne sérielle d'axes linéaires placés au-dessus d'un espace de travail, avec trois axes perpendiculaires de même échelle, ce qui donne trois degrés de liberté de position à l'effecteur final. Un axe de rotation supplémentaire est généralement ajouté pour pouvoir placer les produits dans la bonne orientation. Ils offrent une structure robuste avec une portée potentiellement longue; ils sont idéaux pour les applications répétitives de prise et de dépose qui requièrent une longue portée avec une grande précision et une charge utile importante. Dans le secteur alimentaire, ils sont surtout utilisés pour la palettisation et l'emballage.
- Articulés. Pensez aux omniprésents robots sériels à 6 axes. Leur grand avantage est leur grande maniabilité et len grand nombre de positions et d'orientations de l'effecteur final dans une large plage de travail par rapport à son encombrement. Ils offrent donc plus de liberté et de possibilités de manipulation dans des applications plus complexes que la simple prise et dépose, comme c'est le cas pour le désossage de la viande, par exemple.
Robots "foodgrade"
L'évolution des robots pouvant être utilisés pour manipuler les aliments n'est pas en reste. En effet, les besoins élevés en matière d'hygiène, d'uniformité et de rapidité entraînent une augmentation du nombre de robots à usage alimentaire. Ces robots présentent des caractéristiques telles que la protection IP67 à IP69K (pour le nettoyage), des revêtements époxy, une lubrification certifiée NSF, une construction en acier inoxydable résistant à la corrosion, une encapsulation complète pour éviter la formation de résidus, etc. Ces robots peuvent automatiser divers aspects de la transformation des aliments.
En collaboration avec Fanuc, Stäubli et Yaskawa