Des moteurs pas à pas polyvalents et rentables
Un travail plus précis et plus efficace avec un moteur électrique synchrone sans balais
Avec de plus en plus d'applications en robotique et en pick-and-place, le moteur pas à pas fait fureur dans le secteur de l'automatisation. Sa commande généralement simple et le couple de maintien qu'il permet jouent en sa faveur, mais c'est surtout la rentabilité du moteur pas à pas qui constitue un atout majeur. Motion Control vous présente les tenants et les aboutissants de ce type de moteur.
Comment fonctionne un moteur pas à pas?
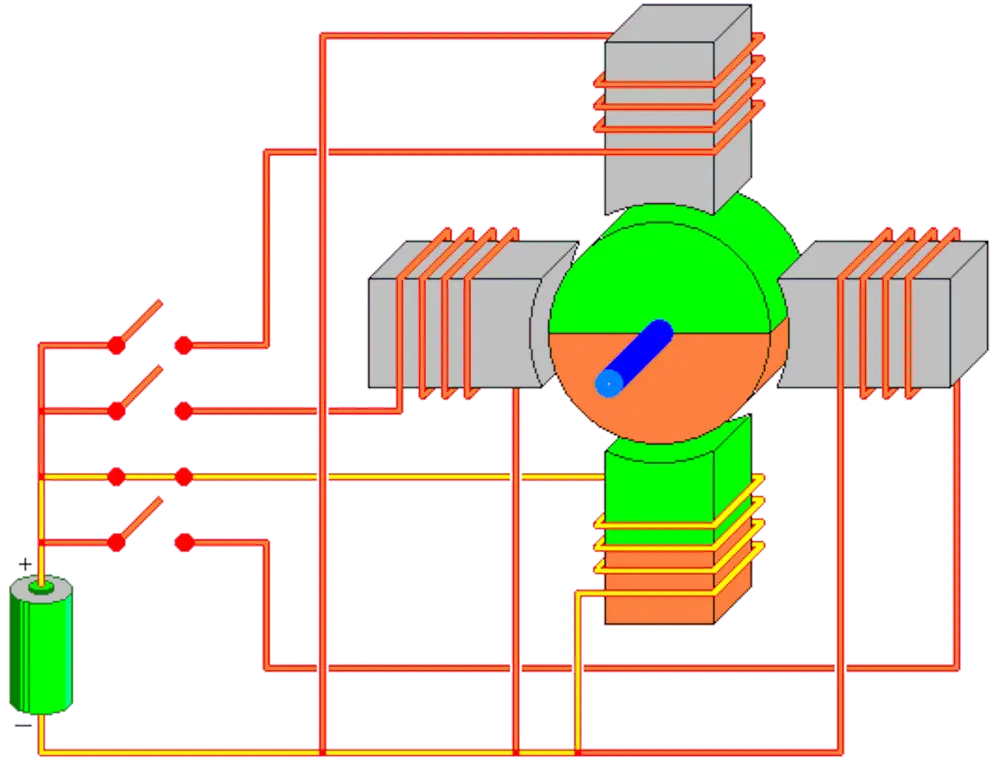
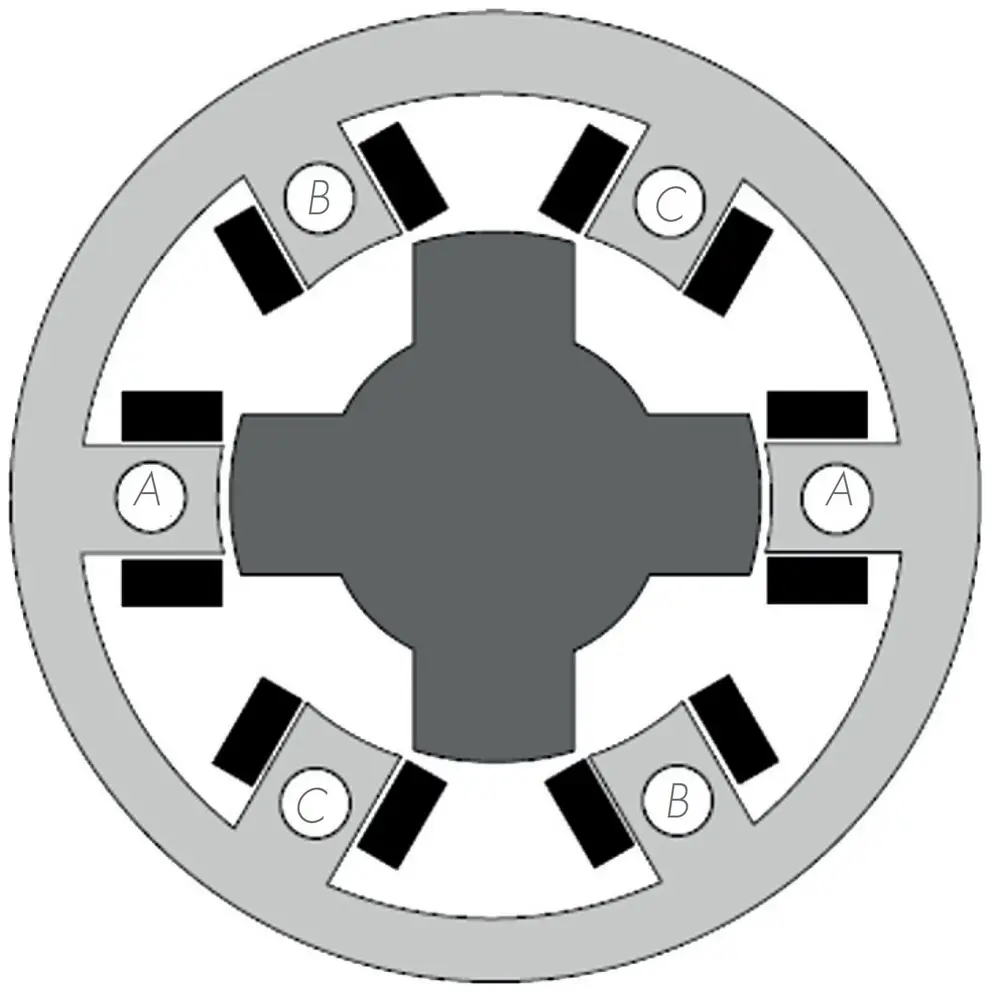
L'idéal pour expliquer le principe de fonctionnement d'un moteur pas à pas – membre de la famille des moteurs électriques synchrones (sans balais) – est un schéma simplifié. De manière rudimentaire, le moteur pas à pas se compose d'un rotor et d'un stator entouré de bobines. En activant une ou plusieurs phases du stator, le courant dans les bobines crée un champ magnétique. Le rotor se déplace vers ce champ. La variation de la vitesse des impulsions permet également de contrôler la vitesse du moteur pas à pas, tout en maintenant la précision.

Avec l'activation des différentes phases l'une après l'autre, le rotor se déplace du nombre de pas requis et atteint ainsi la position souhaitée. Cette rotation angulaire, qui est obtenue par une impulsion d'entraînement, est connue (généralement 1,8 ou 0,9°) et l'on sait donc à l'avance exactement combien de rotation angulaire représente un pas. Une rotation complète – avec une rotation angulaire de 1,8° – nécessite donc 200 impulsions. Cette conversion fonctionne également en sens inverse: en comptant le nombre de pas effectués, on obtient la position angulaire exacte de l'axe. Il n'est donc pas nécessaire d'effectuer une mesure avec rétro-contrôle.
Avantages et inconvénients
Une puissance abordable
L'un des avantages les plus remarquables d'un moteur pas à pas est son couple élevé à très basse vitesse, ce qui le rend très adapté aux applications de positionnement. Ce couple peut même être utilisé comme frein (holding torque).
La simplicité est l'autre atout du moteur pas à pas. La construction simple – dans sa version standard – fait de ce moteur une solution non seulement robuste, mais aussi très intéressante au niveau du prix.
Charge de pointe
L'inconvénient du moteur pas à pas est que chaque mouvement est divisé en étapes. Il n'y a pas de mouvement régulier, ce qui entraîne une charge de pointe à chaque fois. Cela peut entraîner des vibrations et/ou des nuisances sonores.
RESONANCE
Chaque installation – et aussi chaque moteur (pas à pas) – a sa propre fréquence de résonance. Si la fréquence de pas s'approche de cette fréquence de résonance, cela a des conséquences audibles (fonctionnement plus bruyant du moteur), mais aussi des conséquences 'invisibles' telles que des vibrations.
La fréquence de résonance dépend de la charge et de la vitesse de l'application, mais se situe théoriquement toujours entre 100 et 250 pas par seconde.
Dans certains cas, l'approche de la fréquence de résonance peut même entraîner des sauts de pas. Ce problème peut être résolu en ajustant légèrement le nombre de pas ou en appliquant le microstepping.
CLASSIFICATION DES MOTEURS PAS À PAS
Pour classer les moteurs pas à pas, on se base sur les types (construction), les systèmes de commande (principes de fonctionnement) et les enroulements sur les bobines du stator. Nous allons aborder ces éléments dans les sections suivantes.
TYPES
Il existe trois types de moteurs pas à pas sur le marché: à aimant permanent, à réluctance ou hybride.

à Aimant permanent
Les moteurs pas à pas à aimant permanent obtiennent un mouvement grâce à un aimant qui est alimenté. L'impulsion provoque le déplacement du rotor (aimant permanent, avec des côtés sud et nord) vers la phase alimentée sur le moment. Plus le nombre de pôles dans le stator est élevé, plus la résolution de pas est importante. En raison de la circonférence limitée du rotor, seul un nombre limité de pôles est possible. Cela limite également le nombre de subdivisions par tour.
RéLUCTANCE
Les moteurs pas à pas à réluctance (variable) utilisent également le magnétisme, mais d'une manière différente. Ici, le rotor se déplace vers l'endroit où la réluctance (résistance magnétique) est la plus faible. Une impulsion réduit donc la résistance magnétique d'une phase, ce qui permet d'aligner à nouveau parfaitement le rotor sur les dents du stator. Ce type de moteur pas à pas se caractérise par le fait que le rotor et le stator sont dentés, qu'ils n'offrent pas de couple de maintien à l'arrêt et qu'ils fournissent un couple relativement faible.
Hybride
Les moteurs pas à pas hybrides combinent les caractéristiques des deux types. Par exemple, le stator est denté tandis que le rotor est magnétique et denté. Un aimant permanent est placé dans la direction la plus longue (pour la pré-magnétisation), mais les côtés nord et sud sont tournés d'un demi-pas de dent. La rotation s'effectue selon le principe de la réluctance, le rotor visant la situation la plus favorable. Les moteurs pas à pas hybrides ont un couple de maintien, un bon rendement et sont moins sensibles aux problèmes de résonance.
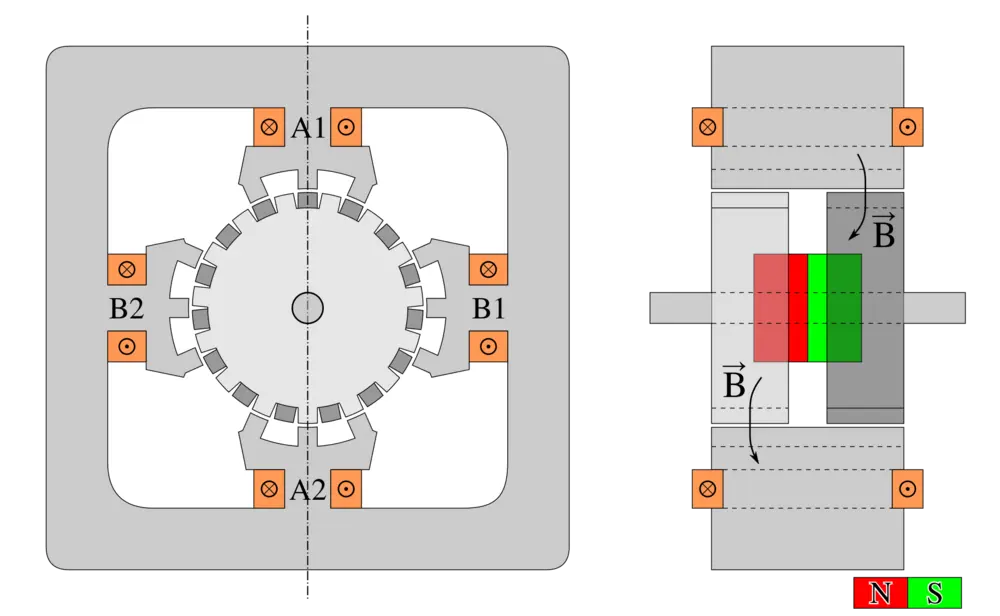
Un moteur pas à pas hybride combine les principes de l'aimant permanent et de la réluctance
commande
Les moteurs pas à pas peuvent avoir plusieurs principes de fonctionnement, le contrôle et la disposition des pas faisant la différence. On distingue le pas complet, le demi-pas et le micropas.
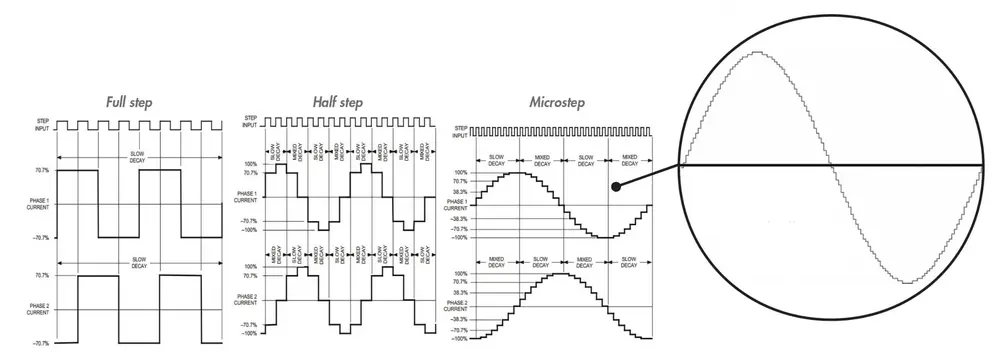
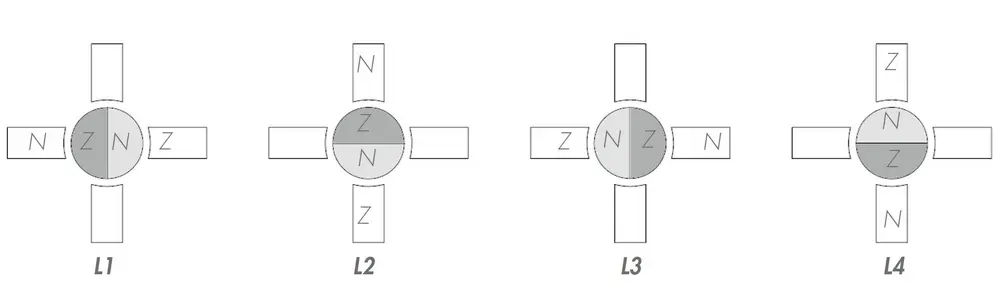
Pas complet
Avec le pas complet, le rotor effectue des pas complets car les phases sont contrôlées l'une après l'autre.
Demi-pas
Avec le demi-pas – comme son nom l'indique – le pas est divisé par deux car une et deux phases sont contrôlées en continu. La taille réduite du pas réduit le bruit et les vibrations.
Micropas
Le micropas est utilisé lorsqu'on souhaite les avantages d'un moteur pas à pas mais que la division en pas (divisés par deux) est trop brutale pour l'application. Cette technique divise chaque étape en étapes plus petites. En utilisant des ondes sinusoïdales échelonnées (micropas), des impulsions encore plus petites sont converties en mouvement. Ainsi, un pas original de 1,8° peut être subdivisé en 64 pas de 0,028°, par exemple. Des pas plus petits entraînent moins de vibrations et de bruit.
Enroulements
Outre le type et la commande, la conception des enroulements sur les bobines du stator a également un impact sur le fonctionnement, car elle détermine la manière dont les connexions doivent être effectuées. On peut distinguer deux principes: unipolaire ou bipolaire.
Unipolaire
Dans les moteurs pas à pas unipolaires, il y a deux enroulements par circuit, chacun avec un branchement centrale (appelée 'common'). Il y a donc six fils de connexion. Les commons sont toujours reliés à la tension d'alimentation. Cette méthode de commande relativement simple perd systématiquement du terrain dans la pratique.
Bipolaire
Les moteurs pas à pas bipolaires n'ont pas de 'common'. Les deux enroulements n'ont donc pas de branchement central, de sorte qu'il n'y a que quatre connexions. La commande requise est légèrement plus complexe, car le courant est envoyé dans les deux sens à travers l'enroulement, mais en contrepartie, le couple peut être exploité au maximum.
TERMES IMPORTANTS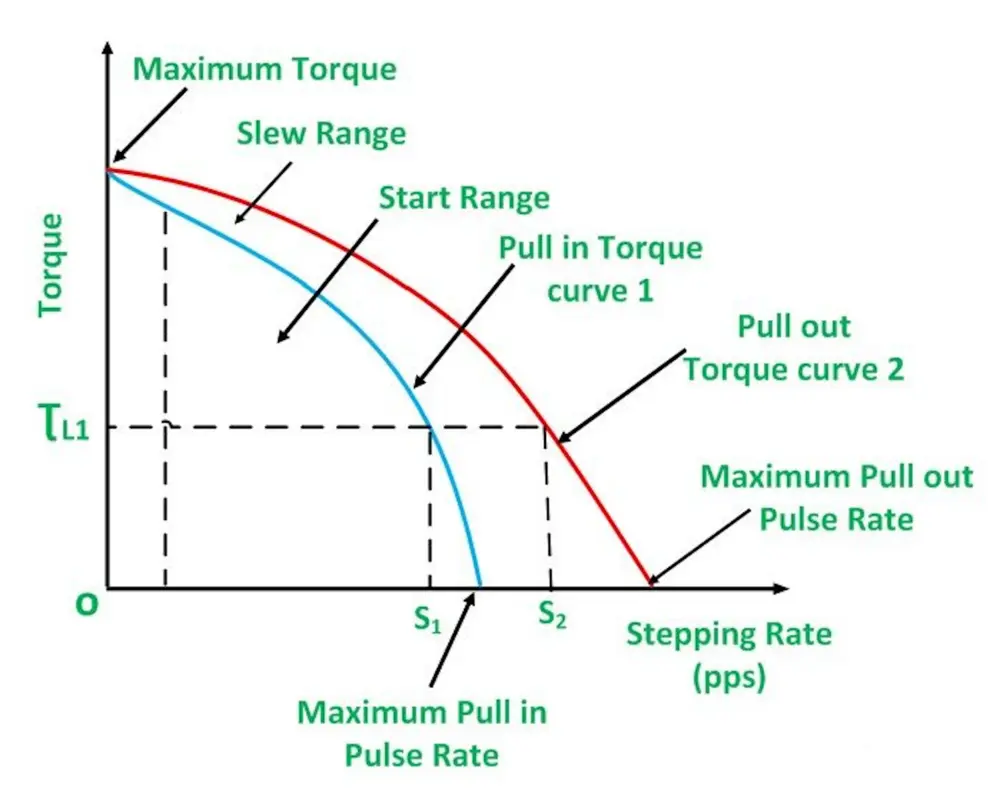 – Detent torque: couple requis par le moteur pour faire tourner le rotor en l'absence de courant. Ce couple se traduit par une ondulation du couple lorsque le moteur pas à pas tourne. Les moteurs à réluctance n'ont pas ce couple.
– Detent torque: couple requis par le moteur pour faire tourner le rotor en l'absence de courant. Ce couple se traduit par une ondulation du couple lorsque le moteur pas à pas tourne. Les moteurs à réluctance n'ont pas ce couple.
– Holding torque: le couple maximal avec lequel on peut charger l'arbre d'un moteur électrique sans qu'il ne perde sa position.
– Pull-in torque: la zone sous le Pull-in dans laquelle le moteur pas à pas peut directement démarrer et s'arrêter sans perdre de pas. La courbe indique la fréquence (vitesse) maximale à laquelle le moteur peut être démarré sans sauter de pas.
– Pull-out torque: en dehors de cette ligne, le moteur risque de sauter des pas. Le moteur peut se mettre en mode 'stall'. La fréquence maximale ne doit pas être dépassée.
– Slew Region: la zone entre le pull-in torque et le pull-out torque et donc la zone où il n'y a pas de perte de pas en raison d'une impulsion trop faible ou trop forte.