
Voor elke applicatie een geschikte camera
Problemen voorkomen vanaf designfasemachine
In deel 1 van dit artikel zagen we al het belang van de kwaliteit van het licht voor het eindresultaat. In deel 2 staan we stil bij de types camera’s die vandaag voorhanden zijn, want ook daar staat de technologie niet stil.

waarbij het systeem zichzelf verbetert door analyse van de eerder gemaakte beslissingen
Cameratypes: belang sensor
Traditioneel zijn er 2 grote benaderingen: de lijnscanners en de gebiedscanners. Zij worden in het vakjargon respectievelijk aangeduid als line- en areascanners. In de industrie wordt vooral die laatste werkwijze toegepast, voornamelijk omdat de techniek toegankelijker is. Dat neemt niet weg dat voor bepaalde applicaties linescanners betere resultaten kunnen geven, zoals bij bewegende objecten op conveyors. Beide principes maken daarbij gebruik van dezelfde beeldverwerkingssensoren, zijnde CCD (charged couple device) en CMOS (complementary metal oxide semiconductor). Zowel CCD als CMOS doet in feite hetzelfde: licht omzetten in elektronen, maar de wijze waarop dat gebeurt is anders. Over het algemeen creëren CCD sensoren beelden van hoge kwaliteit met weinig ruis, we zien ze dan ook vaak opduiken in uitdagende toepassingen waar bijvoorbeeld een hoge snelheid vereist is of daar waar de lichtomstandigheden niet optimaal zijn.
CMOS is door de aanwezigheid van transistoren tussen de photonen op de chip meer gevoelig voor ruis, al is de technologie in recente jaren zeer performant geworden. Bovendien ligt ook de prijs een stuk lager -en nog in dalende lijn.
Line- of areascan?
Het verschil tussen beide werkwijzes ligt vooral in de manier waarop het beeld opgebouwd wordt.
Line scan camera’s
Bij een line scan camera beweegt de scanner over het object, waarbij het beeld per rij opgebouwd wordt. Omdat de opbouw lijn per lijn verloopt, worden de beelden volgens een lineair patroon opgebouwd. Dat zorgt enigszins voor een voordeel bij bewegende beelden werkstukken, maar de keerzijde van de medaille is dat het systeem steeds goed moet afgeregeld zijn. De beeldfrequentie moet exact synchroon verlopen met de beweging van het object. Merk op dat werkstukken ook stationair moeten blijven tijdens hun lineaire beweging. Bij stukken die ook zelf nog eens rondtollen (aardappelen bijvoorbeeld) moet er voor gezorgd worden dat zij op een bepaald punt ergens gefixeerd worden.
snelle conveyors scoren linescanners beter
Area scancamera’s
Area scancamera’s werken niet met een lijn, maar voornamelijk met een 2D-opname, al zijn er ook andere methodes (zie verder). Het opgenomen beeld wordt vervolgens lijn per lijn vernieuwd totdat het hele beeld aan bod gekomen is. Die werkwijze is een stuk toegankelijker maar heeft wel zekere beperkingen. Zo is de kwaliteit minder bij bewegende objecten en zijn ze beperkt in hun FOV (gezichtsveld). Op zich zijn daar wel oplossingen voor in de vorm van ‘stitch’-software, maar dat kost dan weer extra. Ook 3D-beelden kunnen overigens gecreëerd worden met deze techniek, via stereovisie of multiview met meerdere camera’s.
Naast deze techniek kan er ook gebruik gemaakt worden van de ‘sheet of light’-techniek, op basis van laser. De gereflecteerde laserstraal zal een andere vorm krijgen naargelang het stuk varieert in hoogte. Door dat voortdurend te analyseren via software kan een 3D-beeld gereconstrueerd worden. Deze techniek wordt weleens ingezet om van een model een CAD-versie te maken.
Een laatste techniek waarmee een 3D-areascan kan uitgevoerd worden is via ‘ToF’-camera’s (Time of Flight), deze werken met near infrared-stralen. De tijdspanne waarin uitgestraalde stralen onderweg zijn tussen uitzenden en terug ontvangen worden door de sensor, wordt voortdurend opgemeten en zo wordt een 3D-model opgebouwd. Deze techniek is vergelijkbaar met het radarprincipe dat toegepast wordt in de industrie. Dat kan interessant zijn voor verpakkingstoepassingen, bijvoorbeeld om een pallet op te bouwen met diverse onderdelen met verschillende afmetingen. De camera meet elk stuk op en de intelligentie in de software geeft aan een robot door hoe hij het stuk best op een pallet kan plaatsen.

Dat is ook de reden voor te hoge verwachtingen
Theorie vs. Praktijk
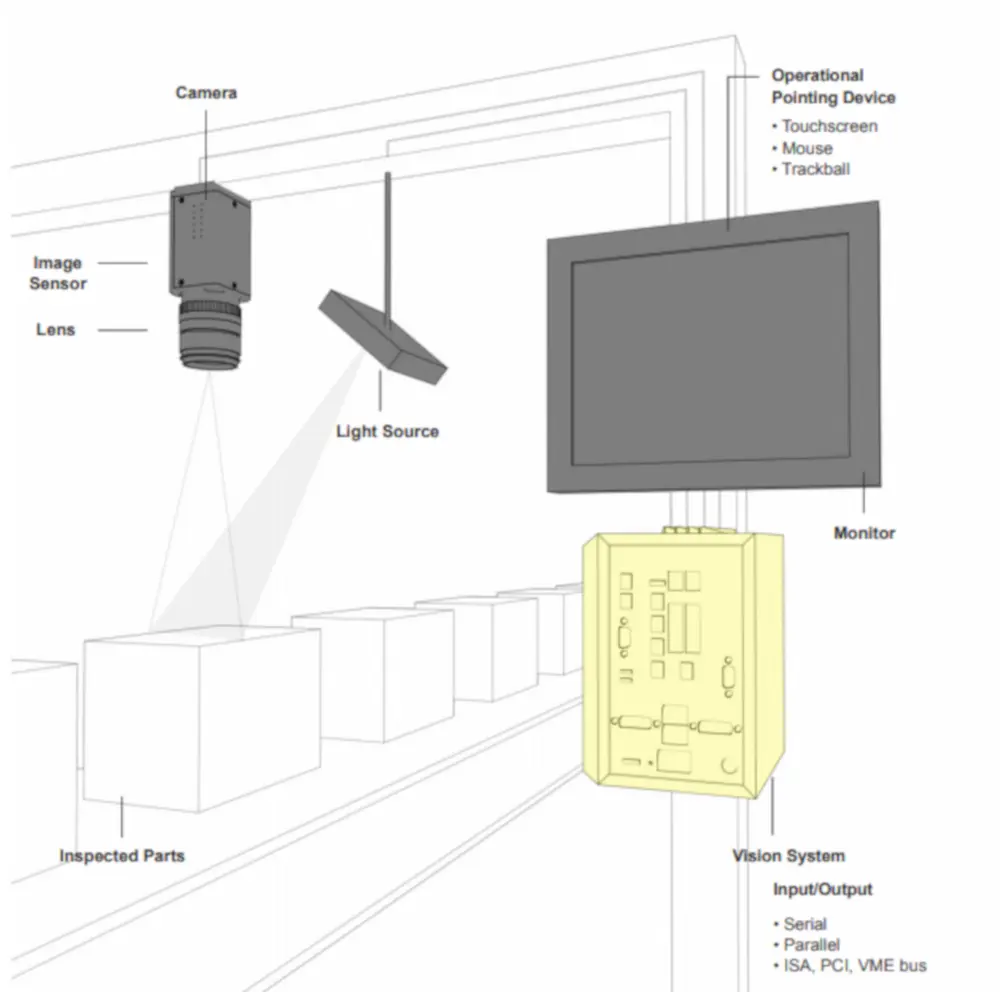
Wie wel eens een automatiseringsbeurs bezoekt, heeft ze ongetwijfeld al gezien: robots die feilloos, snel en uren aan een stuk lukraak liggende stukken oppakken en op hun plaats deponeren. Kinderspel lijkt het vaak, maar de praktijk blijkt iets minder rooskleurig. Dat komt vooral omdat wij met onze eigen ogen kijken naar een applicatie en ervan uit gaan dat de robot – of grijper - de werkelijkheid op dezelfde manier waarneemt. Dat is natuurlijk niet het geval, want machinevision is niks anders dan een digitaal, softwaregestuurd proces. De kwaliteit van een dergelijk proces staat in een rechtstreekse relatie met 3 belangrijke zaken, die bovendien in een soort driehoeksverhouding op elkaar inwerken: de beeldkwaliteit, de softwarekwaliteit en de dataverwerkingssnelheid.
Beeldkwaliteit hangt enorm af van de lichtomstandigheden – dat zagen we reeds in deel 1 van deze reeks – en van de sensorkwaliteit. Wie erin slaagt om de ideale lichtomstandigheden te creëren en verder prima beelden te bekomen dankzij een kwalitatieve sensor, is er evenwel nog niet, want de software moet dan zijn taak uitvoeren. Die taak kan zeer divers zijn: de stukken selecteren die door een robot opgepikt kunnen worden, een stuk met een defect aanduiden of diverse stukken de juiste band opsturen. Zo zijn er tientallen processen te bedenken en elke applicatie kent haar eigen, soms zeer specifieke eigenheden. En daar ligt net de zwakte van machinevision: off-the-shelfoplossingen zijn er quasi niet, er is altijd verfijning nodig. En dat vergt vaak tijd en geld, want een aanvaardbaar resultaat verkrijgen is vaak niet alleen een proces van trial-and-error, maar ook van voldoende data kunnen verwerken. Perfecte beelden creëren is altijd mogelijk, maar daar staat meer dataverkeer tegenover. Dat is duur en heeft ook een impact op de verwerkingssnelheid. Zet al deze hinderpalen na elkaar en u begrijpt waarom niet elk machinevisionproject meteen op een succes uitdraait.
Brengt deep learning soelaas?
Voor bepaalde inspectietoepassingen wordt met interesse naar deep learning gekeken. Deze vorm van intelligentie bootst neurale netwerken na, die de basis vormen voor ons menselijk brein. Het doel is om bepaalde fouten in beelden beter te kunnen herkennen, waarbij het netwerk zichzelf voortdurend verbetert door de eerder gemaakte beslissingen te analyseren. Zo kan een machine op den duur autonoom beslissingen nemen die de accuratesse van menselijke ogen benaderen, evenaren of zelfs verbeteren. Bovendien kan dat aan de snelheidslimiet die de hard- en software toelaat, en die is vandaag sowieso sneller dan die van de mens.