OPEN TOEKOMST MET VEEL POTENTIEEL
Kunnen industriële robots ingezet worden voor verspanende bewerkingen?
Industriële robots komen veelvuldig voor in de industrie. Vooral in assemblage- en verpakkingslijnen. De toepassing bepaalt het type robot. Typisch kennen we de zesassige robots die alomtegenwoordig zijn in bijvoorbeeld productielijnen waar panelen aan elkaar gelast worden, of de palletiseerrobots in seriële of SCARA- uitvoering. Robots inzetten in de verspaning lijkt not done, maar waarom? Het potentieel van de robot in de verspaning is nochtans groot vanwege de enorme flexibiliteit van de bewegingen en het grote bereik.
VERSPANENDE ROBOTS?
De grotere vraag naar efficiëntie en flexibiliteit in de industriële productie heeft recent de vraag naar kosteneffectieve, geautomatiseerde bewerkingen doen toenemen. Hierbij lijken industriële robots heel aantrekkelijk om in te zetten als bewerkingsmachine, aangezien ze heel snel opnieuw geconfigureerd kunnen worden, heel wendbaar zijn en een groot bereik in bewegingen en oriëntaties van de gereedschappen kunnen realiseren (bv. voor frezen).
Door hun grote bereik kunnen er ook heel grote werkstukken bewerkt worden. Daarnaast is de investeringskost van een industriële robot relatief klein ten opzichte van de kost van een bewerkingsmachine (bv. een vijfassige freesmachine). Een vijfassige seriële robot inzetten in verspanende bewerkingen (bv. het frezen van aluminium) lijkt echter een onmogelijke taak, door de beperkte stijfheid en de hoge proceskrachten die optreden tijdens verspanende bewerkingen onder hoge snelheid. Dat leidt ertoe dat de proceskrachten derhalve minimaal moeten zijn, om een zekere nauwkeurigheid te behalen. Robots werden historisch dan ook niet ingezet in verspanende bewerkingen, maar in pick-and-place-applicaties, lastoepassingen, pallettiseertoepassingen, lasersnijden en verven.
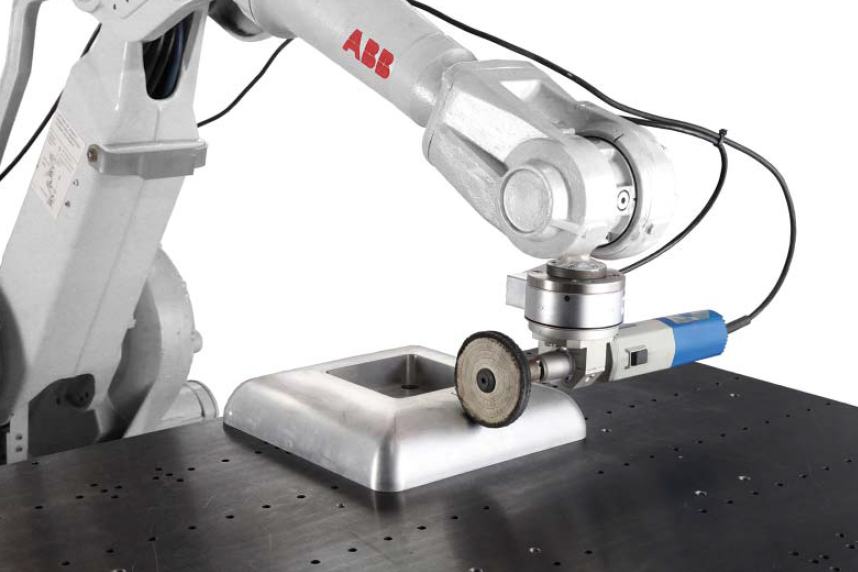
En als een robot dan al ingezet werd in de verspanende bewerkingen, dan betreft het bewerkingen met kleine proceskrachten zoals het slijpen. De eerste robot van ABB was dan ook een slijprobot.
Haalbare nauwkeurigheid
Door recente ontwikkelingen kunnen industriële robots vandaag ingezet worden in allerhande verspanende bewerkingen, van het bewerken van hout tot frezen in aluminium.
Hoewel de haalbare nauwkeurigheid van deze bewerkingen met industriële robots volstaat voor allerhande toepassingen, is die echter nog niet helemaal vergelijkbaar met die van klassieke verspanende machines en behoren harde materialen nog niet tot het assortiment.
Die nauwkeurigheid moet dus verbeterd worden. Tal van onderzoeksinstellingen verrichten dan ook onderzoek naar mogelijke manieren om die te verhogen - ook in samenwerking met robotproducenten (bv. een samenwerking tussen Stäubli en UMONS, de Universiteit van Bergen). Daarnaast is er een Europees project (COMET) lopende, waarbij het doel gesteld is om de nauwkeurigheid van verspanende bewerkingen met industriële robots te verkleinen tot 50 micrometer en om zo competitief te zijn met de klassieke machines.
Voordelen
Het potentieel van industriële robots in de verspaning is groot. Onder meer door de grote variëteit aan formaten en configuraties van industriële robots is een breed gamma aan te bewerken werkstukken mogelijk. Het bewerken van grote tot zeer grote werkstukken wordt op die manier gefaciliteerd.

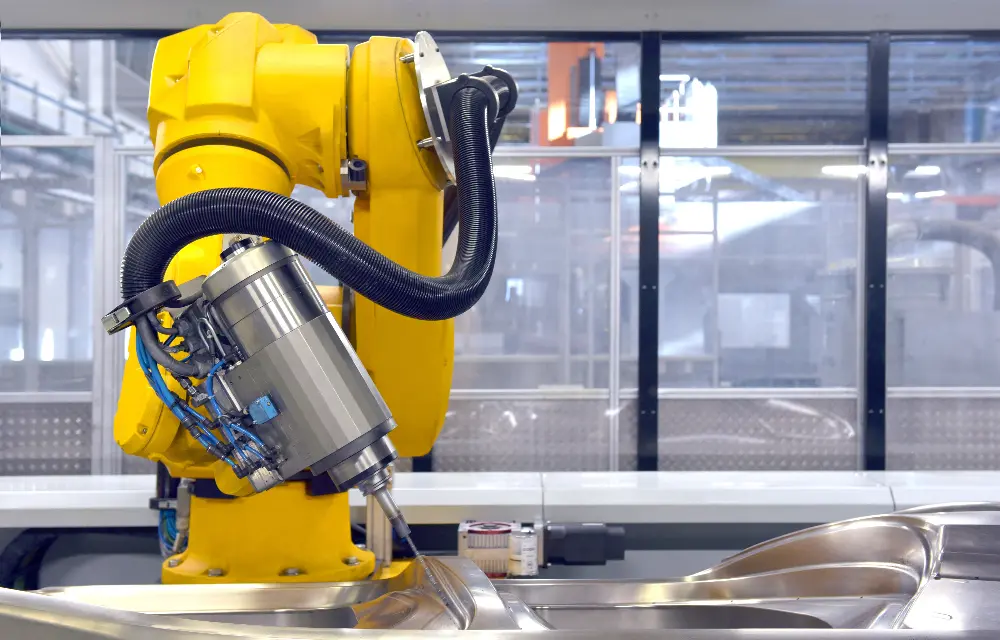
Daarnaast zijn complexere werkstukken en werkstukken met moeilijk te bereiken plaatsen en moeilijk uit te voeren bewegingen mogelijk door de grote wendbaarheid van de seriële robotarm. Bijvoorbeeld het frezen van gekromde oppervlakken wordt eenvoudiger: het frezen van een sleuf in een buis is eenvoudig programmeerbaar op een industriële robot. Het inzetten van een seriële robot is verder ook een stuk kostenefficiënter doordat de investering een pak lager ligt dan bij conventionele machines. Er wordt geschat (UMons) dat ongeveer 30% in de bewerkingskost bespaard kan worden door eenzelfde werkstuk door een industriële robot te bewerken in plaats van een conventionele machine.
WAAROM DUURDE HET ZO LANG EN WAAROM KAN HET NU WEL?
Ondanks het grote potentieel werden industriële robots slechts minimaal ingezet voor processen met minimale proceskrachten.
Ook vandaag zetten slechts weinig robotproducenten in op verspanende robots. Zij die er wel op inzetten, brengen hiervoor speciale reeksen op de markt om de grootste nadelen te counteren.
Enkele van de voornaamste redenen dat het lang duurde vooraleer er verspanende robots op de markt kwamen, liggen niet alleen in de relatief lage stijfheid van de mechanische structuur van de robot, maar ook in de voorheen beperkte aanstuurmogelijkheden.
De beperkte aanstuurmogelijkheden hinderden vroeger het inzetten van verspanende robots
Aansturen
De postprocessor bij CAM-software was tot voor kort enkel op traditionele machines gefocust en liet niet toe om met robots te werken.
Daarnaast ontbrak dikwijls ook de mogelijkheid om de robot aan te sturen, via de roboteigen sturing en niet via thirdpartysturing, in een ISO G-code, die gebruikt wordt voor klassieke machines om het traject van de verspanende bewerkingen te beschrijven en een resultaat van de CAM-software is.
Mechanische structuur

Tot voor kort werden er voor verspanende bewerkingen 'gewone' industriële robots gebruikt. Die hebben onvoldoende stijfheid voor verspanende bewerkingen met hoge proceskrachten, onvoldoende precisie in vergelijking met de herhalingsnauwkeurigheid ISO 9283 en zijn niet voorzien van een geïntegreerde freesmotor/ spindel in de robotarm.
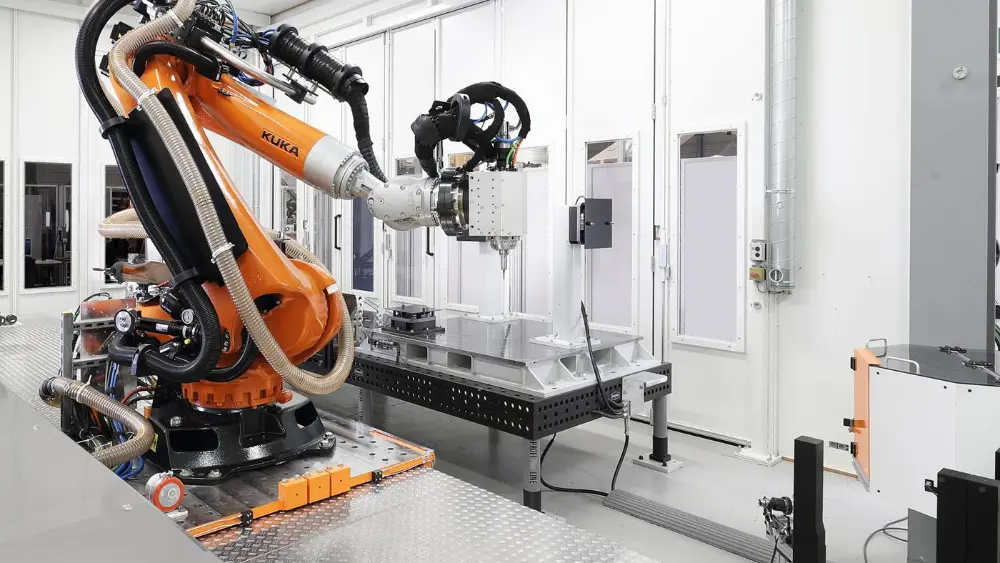
Recent worden er echter ook 'dedicated' robots voor vijfassige verspanende bewerkingen op de markt gebracht.

Bij verspanende robots wordt ingezet op:
- Recent zijn speciale postprocessoren beschikbaar bij verschillende CAM-softwareleveranciers. Daarnaast bieden verschillende producenten van robots vandaag een softwarepakket aan dat het programmeren vanuit G-code toelaat in de roboteigen sturing. Ook een verdere integratie van de verspanende robots in de CAD/CAM-procesketen behoort tot de verdere ontwikkeling van verschillende robotproducenten. Daarnaast wordt er ook ingezet op de integratie van een machinebesturing met een bijbehorende bedieningsinterface en speciale postprocessor bij verschillende CAM-softwareleveranciers.
- Een dedicated robotontwerp met vijf assen en een geïntegreerde spindel. Hierbij is een breed gamma aan robots met verschillende reikwijdtes mogelijk in combinatie met een breed gamma aan spindels. Om een verhoogde precisie te bieden, worden deze robots uitgerust met geoptimaliseerde tandwielsets. Daarnaast is er ook een absolute kalibratie van deze robots mogelijk. Dedicated freesrobots worden bijvoorbeeld ontworpen naar een geoptimaliseerd werkgebied voor verspanende bewerkingen.
- Het integreren van automatische tool changing (zowel qua hardware als software) zoals bij klassieke machines.
- Andere producenten steunen voor verspanende bewerkingen op force control. Het toevoegen van sensoren die de proceskrachten meten, en het terugkoppelen naar de regellussen maken het mogelijk nauwkeuriger te frezen of slijpen. Force control wordt hierbij voornamelijk gebruikt voor bewerkingen op hout. De krachtcontrole laat ook toe om snel van werkstuk en type materiaal te veranderen omdat de krachtsensoren het werkstuk 'voelen'. De bijbehorende software maakt het programmeren van deze bewerkingen een stuk eenvoudiger.
- Tot slot wordt er ook sterk ingezet op het ontwikkelen van efficiënte kalibratieprocedés.
WELKE BEWERKINGEN ZIJN AL HAALBAAR?
Door deze ontwikkelingen is er al een wijd gamma aan bewerkingen op een wijd gamma aan materialen haalbaar met verspanende industriële robots. Zo zijn modelleren, contouren, frezen, oppervlaktebehandeling, trimmen, ontbramen, nabewerken van lasnaden en boren en tappen mogelijk op materialen als aluminium, staal, carbon en composieten, steen, glas en zachtere materialen als schuimhars, hout en plastics.
Wat mogelijk is, hangt natuurlijk sterk af van de robotproducent en de vereiste nauwkeurigheid. Zo zullen de 'dedicated' robots een heel breed gamma aan combinaties toelaten, vergeleken met klassieke industriële robots.
Deze grote variëteit aan bewerkingen en materialen laat toe dat verspanende robots in allerhande sectoren al actief zijn. Voorbeelden zijn de automotive, aquatics, lucht- en ruimtevaart, prototyping, de energiesector, de kunststofsector, de staalsector, de kristalsector, de steenhouwerssector en de houtsector.
Met de bestaande sturing en robots zijn nauwkeurigheden van ± 0,4 mm haalbaar op CFK- en GVK-onderdelen.
WAT KAN ER NOG NIET?
De nauwkeurigheid van de bewerkingen met industriële robots is al significant verbeterd in vergelijking met wat in het verleden mogelijk was. Deze nauwkeurigheid is dan ook voldoende voor allerhande toepassingen. Een extreem precieze nauwkeurigheid in micrometer, zoals vijfassige portaalfreesmachines halen, is echter nog niet mogelijk. Daarnaast is het zwaar verspanen van hard materiaal zoals inox-Inconel nog niet realiseerbaar, vanwege de lage stijfheid van de machine en de hoge proceskrachten.
WAT IS ER DAN NODIG OM DIT HAALBAAR TE MAKEN?
De haalbaarheid van verspanende robots ligt niet enkel in hun verbeterde nauwkeurigheid of stijfheid, maar ook in verder onderzoek naar de invloed van proceskrachten op de beweging en de nauwkeurigheid van de robot. Naast de robotproducenten die inzetten op verspanende robots, zetten bovendien ook verschillende onderzoeksinstellingen hun schouders onder het onderzoek dat nodig is om dit haalbaar te maken.
Een samenwerking tussen Stäubli en UMons is bijvoorbeeld gefocust op het onderzoek naar de invloed van de hoge proceskrachten op de robot en nauwkeurigheid. Daarnaast is het doel van het EU/FP7-project COMET om de nauwkeurigheid van verspanende bewerkingen met industriële robots onder de 50 μm te krijgen voor bijvoorbeeld freesbewerkingen.
Dedicated freesrobots worden ontworpen naar een geoptimaliseerd werkgebied voor verspanende bewerkingen
In de literatuur is er gerapporteerd dat de beperkte bandbreedte van de positiecontrolelussen een doorslaggevende factor is. Die is voor een standaardrobot beperkt door de eigen frequenties van de mechanische robotstructuur. De onderliggende oorzaak hiervan is de beperkte stijfheid van de robotgewrichten. In vergelijking met conventionele CNC-machines voor bv. freesbewerkingen is de stijfheid van een industriële robot tot vijftig keer kleiner. Die lage stijfheid en bijbehorende laagfrequente resonantiefrequenties kunnen onder bepaalde snijparameters leiden tot verhoogde proceskrachten en zelfs trillingen (ook chatter genoemd). Chatter is een van de grootste oorzaken dat industriële robots qua nauwkeurigheid nog niet competitief zijn met klassieke machines, en is het grootste struikelblok om industriële robots in te zetten in de verspanende industrie. Onderzoek naar het effect van deze proceskrachten op het dynamische gedrag van de robot is dus noodzakelijk. Daarnaast kan een combinatie met een micromanipulator (onderzoek door Lund University Zweden) een oplossing bieden waarbij deze de lage bandbreedte van de mechanische robotstructuur compenseert (dit is nog in onderzoeksfase). De robot wordt in dit concept gezien als een middel om de grove beweging uit te voeren, terwijl er op de eindeffector een micromanipulator geplaatst wordt die de precieze beweging doet. Deze moet dan ook de onnauwkeurigheden opvangen die veroorzaakt worden door de hoge proceskrachten en de lage stijfheid van de robot. In dit onderzoek toont men aan dat de bandbreedte van de tip vergroot werd door het toevoegen van een micromanipulator.
In een experimentele opstelling werd aangetoond dat de resulterende fout van de micromanipulator ongeveer ±12 μm bedraagt in al zijn assen, wat ver beneden de doelstelling (50 μm) van het COMET-project ligt.
FINAAL OORDEEL
De toekomst van de verspanende robot ligt open door recente ontwikkelingen en 'dedicated' robots, speciaal ontworpen voor deze taak. Zowel op economisch vlak als op het vlak van flexibiliteit heeft een industriële robot een groot potentieel. In allerhande toepassingen kan deze al ingezet worden. Verder onderzoek is echter nodig om extreem nauwkeurige bewerkingen en de verspaning van harde materialen te kunnen realiseren.
