
Le potentiel croissant des robots modulaires
Applications, défis et perspectives d'avenir

(photo: Beckhoff Automation)
En 2022, quelque 141 robots pour 10 000 travailleurs ont été déployés en moyenne dans l'industrie manufacturière, selon la Fédération internationale des robots, soit le double de 2015. La part de marché des robots collaboratifs augmente également. La part des robots collaboratifs dans les ventes totales de robots industriels aurait encore dû avoir augmenté ces dernières années. Mais qu'en est-il des robots modulaires? Que sont exactement les robots modulaires? Dans quelle situation peuvent-ils se différencier des robots classiques et des cobots ? Et suivront-ils la même tendance?
Qu'est-ce qu'un robot modulaire?
Le concept de base d'un robot modulaire se retrouve dans le nom proprement dit. Il s'agit d'un robot composé de modules : des composants de base qui reviennent à différents endroits dans la conception du robot. Pensez à rla réutilisation du même type (ou des variantes) de joint moteur pour différents axes du robot. Cette standardisation présente de nombreux avantages, tels que la réduction des coûts de développement et de production aisi que la diminution du nombre de pièces de rechange. Ainsi, les robots peuvent être conçus et produits de manière efficace.
En outre, la modularité peut être utilisée pour fournir une solution sur mesure à des besoins d'automatisation spécifiques, grâce à une configuration personnalisée. Ce degré de modularité devrait permettre d'obtenir rapidement des conceptions et des réalisations spécifiques. Sur le plan commercial, nous voyons apparaître diverses options, des plateformes mobiles modulaires aux robots articulés ou linéaires modulaires. Ceertains fabricants permettent de configurer de tels robots sur mesure via un configurateur en ligne en fonction des besoins du client.
Une étape ultérieure dans la conception et l'assemblage de robots flexibles réside dans les modules qui permettent d'ajuster la configuration du robot de temps à autre. Ces modules sont conçus de manière à pouvoir être déconnectés les uns des autres et rattachés les uns aux autres rapidement et facilement.

Configurations?
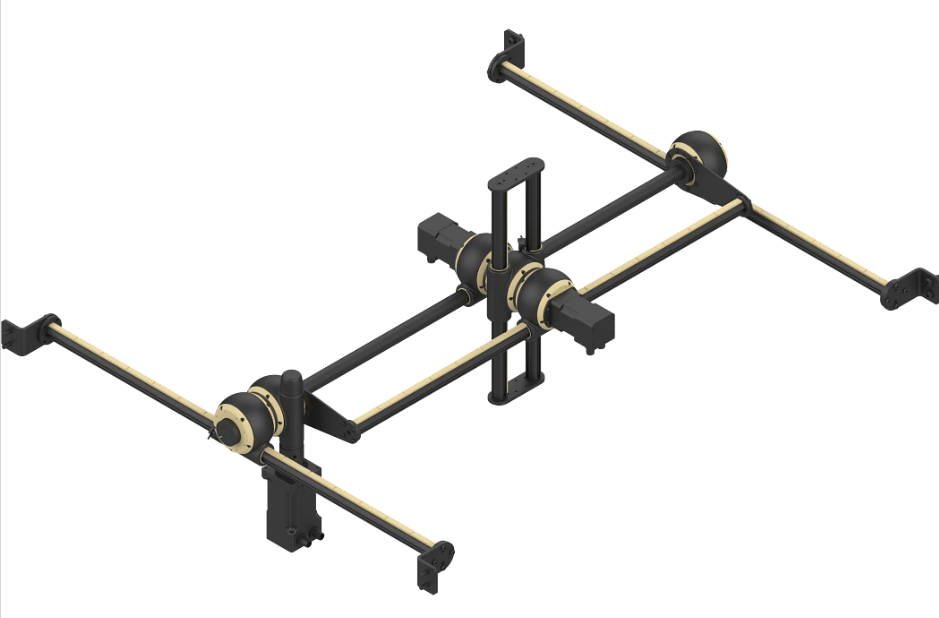
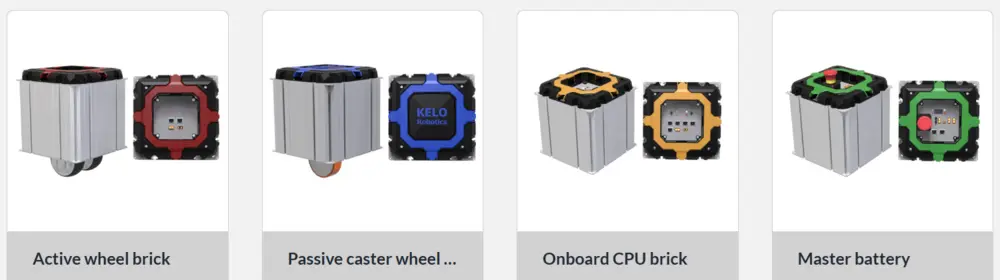
Les modules existent en différentes tailles et poids, offrant des solutions pour différents objectifs. Par exemple, il existe des modules qui ont une fonction active (un arbre moteur), des modules de stockage d'énergie (pensez aux robots mobiles modulaires qui ont besoin de batteries) ou des modules qui ont uniquement une fonction structurelle (comme la connexion de deux axes pour construire un manipulateur sériel).
Les modules sont conçus de manière à pouvoir être déconnectés les uns des autres en un instant
Cette modularité, combinée avec un certain nombre de variantes des modules proposés, permet à l'utilisateur d'assembler une grande variété de configurations, telles que des robots SCARA, des robots Delta, des robots sériels (de 1 axe à 7 ou plus) ou des robots multibras. Les exigences techniques telles que la charge utile ou la portée du robot dépendent de la sélection des modules.
Les possibilités semblent infinies. Cependant, plus la configuration est complexe et plus il y a d'axes, plus la cinématique est complexe et plus l'IPC doit être puissant pour tout contrôler. L'aide à la sélection et à la combinaison des modules est généralement fournie sous la forme d'une interface utilisateur graphique.

Mise en service = beaucoup de travail manuel?
Lorsqu'on entreprend de construire et de mettre en service son propre robot à l'aide de modules standards, on pense immédiatement à deux défis majeurs. L'aspect mécanique ou l'assemblage, et le logiciel ou la programmation.
Sur le plan mécanique, les modules sont généralement conçus de manière à pouvoir être connectés de manière simple, avec ou sans connecteurs mécaniques rapides et connecteurs électriques. Généralement, il est également question d'une standardisation du format et du couplage au sein de la gamme de modules (du même fabricant, pas entre eux), ce qui contribue à la simplicité de l'assemblage.
Du côté des logiciels, de nombreuses aides sont fournies. Soit la configuration du robot peut être facilement établie via une interface graphique, soit elle est entièrement automatisée. Par exemple, les modules sont conçus de telle sorte qu'une fois connectés, l'ensemble de la chaîne est automatiquement scanné via un protocole de communication.
Ainsi, la cinématique est déterminée automatiquement et aucune configuration manuelle dans un environnement logiciel n'est nécessaire. Les mathématiques complexes qui sous-tendent la cinématique du robot (en raison de l'ordre des axes, des distances entre eux et de la manière dont ils sont orientés les uns par rapport aux autres) sont déterminées automatiquement.

Avantages de la réutilisation des mêmes modules
La réutilisation d'un module (ou d'une variante d'un module) dans la construction d'un robot offre de nombreux avantages supplémentaires auxquels on ne pense pas de prime abord.
Par exemple, certains modules d'axe de robot (articulation) sont dotés d'une rotation sans fin (> 360°) pour laquelle l'air comprimé, la communication, le courant et l'E/S passent par le connecteur. Lorsqu'on configure un manipulateur sériel à 6 axes avec un tel module, tous les axes sont tout à coup capables de tourner sans fin. Cela présente de nombreux avantages par rapport aux robots classiques. Les temps de cycle peuvent être raccourcis du fait que le robot peut suivre le chemin le plus court/le plus rapide et n'est pas limité par les limites de rotation des axes (ce qui restreint la liberté de mouvement du manipulateur).
Dans certains cas, ceci peut représenter un gain important, par exemple lorsque le robot doit aller d'un point A à un point B, mais qu'il doit faire un grand détour en raison de la limitation des angles d'articulation. Par ailleurs, il est possible d'éviter/réduire l'usure en utilisant l'ensemble des 360°, alors qu'habituellement, en raison de la rotation répétitive, il est beaucoup plus probable que l'usure se produise sur une partie de la zone de mouvement de l'axe.
Lorsqu'un module d'axe de robot(articulation) est conçu de manière à ce que chaque axe dispose de son propre moteur et de son propre entraînement (drive), le boîtier de commande du robot se réduit à un IPC et à une alimentation. Si ce n'était pas le cas, il faudrait prévoir un drive dans le boîtier de commande pour chaque module représentant un axe du robot, qui doit aussi être câblé.
L'utilisation de modules avec drive intégré simplifie considérablement le câblage, ce qui offre également de grands avantages en termes de reconfigurabilité : il n'est pas nécessaire de modifier le boîtier de commande lors de la reconfiguration des modules. L'ajout d'un axe supplémentaire ne nécessite pas non plus l'extension du boîtier de commande avec un servodrive supplémentaire.
Configuration unique ou reconfiguration tout au long de la durée de vie?
La modularité des robots n'est pas seulement intéressante pour configurer et construire un robot personnalisé une seule fois. La reconfiguration tout au long de la durée de vie du robot peut offrir une valeur ajoutée intéressante à plusieurs niveaux.
D'une part, elle offre la possibilité d'être plus robuste et plus adaptatif que les systèmes conventionnels. Ces robots pourraient facilement s'adapter au contexte, à l'environnement et à la tâche afin d'être plus performants et plus largement déployables. La reconfiguration permet d'apporter une réponse très souple et rapide aux besoins futurs et de réutiliser un robot pour différentes applications.
Cela offre également une grande valeur dans le contexte de l'automatisation flexible. En effet, la demande actuelle du marché s'éloigne de la production en série pour se diriger vers la personnalisation de masse et, par conséquent, vers une grande variété d'options et de possibilités sur un même produit. Toutefois, cette personnalisation doit également être possible au coût de la production en série pour être compétitive.
La reconfiguration tout au long de la vie du robot peut apporter une valeur ajoutée intéressante dans plusieurs domaines
Dans un contexte plus large, nous considérons la production"high-mix low-volume" (HMLV), c'est-à-dire la demande de pouvoir produire une grande variété de produits en petites quantités. Ce n'est pas seulement la programmation qui doit être flexible, mais aussi l'agencement de l'atelier de production et la configuration des cellules. Dans de tels contextes, un robot entièrement modulaire et reconfigurable à la volée présente d'énormes avantages.
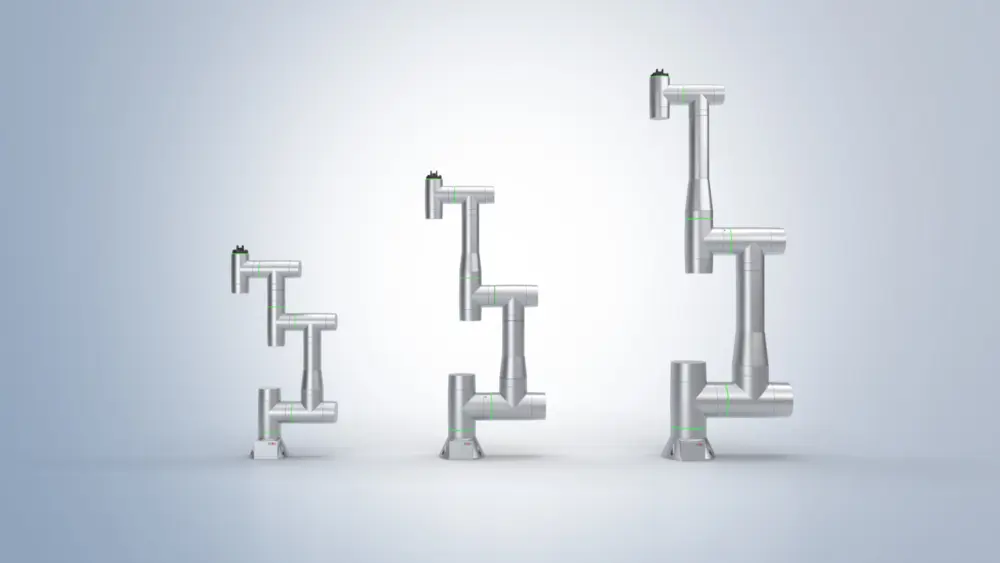
Supposons qu'une application particulière nécessite un robot à 7 axes, il suffit d'ajouter un seul module (un axe actif) au robot à 6 axes déjà disponible. Ou encore, si un nouveau produit exige soudain une plus grande portée, le robot existant peut être facilement converti en ajoutant des modules intermédiaires plus longs.
Dans le cas d'une cellule robotisée conçue pour les petites séries, une augmentation de la demande peut soudainement nécessiter un débit plus important de la part du robot. Au lieu de retirer le robot existant de la cellule et d'en acheter un autre, le robot existant peut être converti en robot à deux bras. Le robot évolue en fonction de l'évolution de l'atelier et de l'application.
Enfin, la modularité offre également de nombreux avantages en termes de maintenance. Les modules peuvent facilement être stockés en tant que pièces de rechange. Étant donné que seuls quelques modules sont concernés, le stock de pièces de rechange reste limité. Ainsi, les modules peuvent être remplacés rapidement et facilement en cas de défaut. Ceci contraste avec l'attente d'une intervention ou l'envoi du robot lui-même au fabricant pour réparation, qui entrapine l'arrêt de la production.
Public cible?
La différence entre les robots modulaires et les robots off the shelf standards réside dans la manière dont ils sont commercialisés. Certains robots modulaires ne sont pas considérés comme des robots destinés à concurrencer les robots traditionnels. L'idée est de fournir des modules et des outils pour que les utilisateurs puissent configurer eux-mêmes un robot adapté à leurs propres besoins.
Le coût?
En proposant quelques modules de base, il est possible d'obtenir une large gamme de solutions spécifiques à un coût proche de celui de la production de masse (des modules). Toutefois, les robots modulaires ne sont généralement pas conçus pour être compétitifs en termes de prix d'achat. Les modules peuvent être plus chers à l'achat, mais ils peuvent récupérer ce surcoût sur leur durée de vie grâce à la maintenance modulaire (en ne remplaçant que les modules cassés) ou en pouvant être utilisés dans davantage d'applications grâce à la reconfigurabilité.
Qu'en est-il des performances ?
En raison de la construction modulaire, les performances de ces robots modulaires sont susceptibles d'être inférieures à celles de robots conçus de manière très spécifique. Toutefois, le degré de flexibilité de la configuration offert par la modularité permet de trouver un compromis entre les performances et la complexité mécanique et informatique.
Certains robots modulaires ne sont pas considérés comme des robots capables de concurrencer les robots classiques
Reconfiguration manuelle ou autoreconfiguration?
Pour aller plus loin - bien qu'à des stades de recherche pour différentes applications et différents types de robots modulaires -, on étudie également des robots modulaires autoreconfigurables qui modifient eux-mêmes leur morphologie en cours d'utilisation. L'autoreconfiguration peut porter la robustesse et la flexibilité du système à un niveau supérieur, puisque ceci permet, par exemple, au robot de remplacer lui-même les modules défectueux ou de se reconfigurer pour continuer à accomplir la tâche qui lui a été confiée. Une telle auto-autonomie nécessite évidemment une forme avancée de prise de décision autonome.
(photo: Beckhoff Automation)
Conclusion: tous les robots sont-ils des robots modulaires ?
Le concept de robotique modulaire semble particulièrement attrayant et intéressant à plusieurs niveaux. Selon le degré de complexité avec lequel on envisage la robotique modulaire, on peut se demander si elle a du sens par rapport à une gamme de produits standards. Les fabricants ont également des points de vue très différents à ce sujet. Alors que certains croient aux avantages et à l'avenir d'un concept de robot modulaire (industriel articulé), d'autres s'en tiennent à une large gamme de robots standards et n'envisagent pas de développer la robotique modulaire.
Souvent, l'argument est qu'il existe un très grand nombre de robots, du plus petit au plus grand, avec plus ou moins d'axes, plus ou moins de charge utile et de portée, et pour un large éventail d'applications. Par conséquent, le besoin d'un robot reconfigurable ou d'un robot personnalisé unique est faible. En outre, on fait valoir qu'il est difficile d'obtenir des robots constitués de modules détachables aussi précis que les robots standards qui ont été perfectionnés au fil des ans.
La robotique modulaire complexe, telle que les manipulateurs articulés, est en phase de développement. Ils font l'objet d'une promotion et sont présentés dans les salons professionnels, mais dans la pratique, on les trouve encore très peu dans l'industrie. Cela ne signifie pas pour autant qu'ils n'y apparaîtront jamais. Il faudra attendre que le marché soit prêt à les accueillir et que les applications et les contextes se prêtent au déploiement de tels manipulateurs modulaires. La différence entre les robots modulaires et les robots on the shelf standards réside dans la manière dont ils sont commercialisés et dans le public cible auquel ils s'adressent.
En coopération avec Beckhoff Automation, Igus et KELO Robotics