
Steeds meer toepassingen voor robots in voedingsindustrie

Automatisering en robotica zorgen in de voedingsindustrie al langer voor hogere efficiëntie. De huidige focus hiervan gaat meestal naar repetitieve en controleerbare toepassingen, zoals pick-and-place. Het streven naar een grotere kostenefficiëntie en productiviteit drijft evenwel de nood aan robotica binnen een bredere set aan toepassingen, van transport over palletisatie tot assemblage van voedsel. Ook de hoge loonkost en het tekort aan arbeidskrachten werkt dit in de hand.
Behandelen van voeding
De inzet van robots voor nieuwe toepassingen brengt uiteraard extra uitdagingen met zich mee, die typisch niet aangepakt worden in klassieke roboticatoepassingen binnen de voedingsindustrie. We geven hieronder een overzicht van de recente ontwikkelingen op het gebied van food handling robots en geven aan in welke activiteiten in de voedselverwerking ze zoal worden ingezet of waar een groot potentieel zit. Dit naast de ontwikkelingen op het vlak van de klassieke pick-and-placerobots binnen de voedingsindustrie.
In het algemeen wordt verondersteld dat de inzet van robotica in de voedingsindustrie achterloopt ten opzichte van andere industriesectoren. Food & Beverage is nog steeds een kleine markt voor robotica (± 4%) ten opzichte van enkele grote sectoren zoals elektronica en automotive (± 25 % elk).

Dat gezegd, zetten de cijfers bovenstaande ambities en noden kracht bij en is er een opwaartse trend merkbaar in 2024 ten opzichte van 2022 (3 naar 4% marktaandeel en een stijging van >30% in aantal robotinstallaties binnen de F&B-sector). Waar in de grote sectoren eerder een beperkte afname (van enkele procenten) van hun marktaandeel te merken is, zien we in de voeding dus een toename, en dat in een algemeen dalend globaal aantal installaties van robots (± 2%).
Nieuwe toepassingen
Hieronder volgt een select overzicht van enkele nieuwe toepassingsgebieden van robotische automatisering binnen de voedingsverwerking, naast de klassieke pick-and-place.
Belading van voedselverwerkende machines
In verschillende processen worden machines manueel beladen, zoals ovens of verpakkingsmachines. Dergelijke taken zijn bijzonder tijdkritisch en tijdrovend. Het geautomatiseerd beladen van machines komt reeds veelvuldig voor in de maakindustrie, zoals bij het beladen van CNC-machines. Ook binnen de voedingssector is het potentieel hiervan groot, want dit maakt een 24/7-productie mogelijk. Daarnaast worden werknemers minder blootgesteld aan gevaarlijke omstandigheden die dergelijke apparatuur met zich meebrengen.

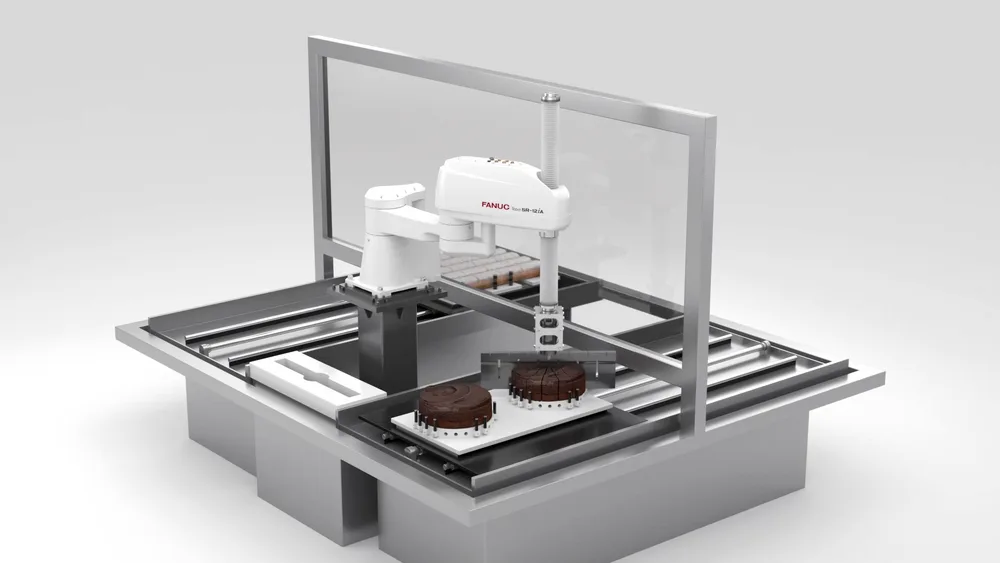
Gerobotiseerd snijden
Precies snijden (vlees, kaas, gebak …) is essentieel in de voedselverwerking. Robotisch snijden, of het gebruik van geavanceerde robotische systemen voor het snijden van voedsel, belooft een consistente en precieze snede, een minimale waste en een verhoogde efficiëntie. Toepassingen lopen uiteen, ook in complexiteit.
Toepassingen lopen uiteen, van het snijden van taart tot het uitbenen van varkensvlees
Het snijden van taart gebeurt bijvoorbeeld met behulp van een ultrasoon mes. Flexibele programmatie laat toe om veel variaties in snijpatronen te verkrijgen. Het uitbenen van vlees brengt extra uitdagingen met zich mee, mede omdat elk dier verschillend is en er een doorgedreven hand-oogcoördinatie nodig is. Automatisering biedt hier veel potentieel, omdat het voor mensen een uitdagende omgeving is en het complex, repetitief werk is om uit te voeren. De uitdagingen naar de robotica toe zijn echter ook niet min.
Beperkte automatisatie in deze context is reeds gerealiseerd. Zo kan een 3D-beeld gemaakt worden van het stuk vlees met behulp van X-ray, waarna een snijplan gemaakt kan worden. Zowel visuele perceptie als krachtmetingen zullen tijdens de uitvoering belangrijk zijn. Veel uitdagingen in allerhande andere toepassingen dienen nog geadresseerd te worden.
Manipuleren van deeg
Het manipuleren van delicate producten, zoals rauw deeg, blijkt uitdagend om te automatiseren. Dit is namelijk klevering en vervormt gemakkelijk. Foutieve manipulatie zal ervoor zorgen dat een bol of schijf (bv. pizzadeeg) gaat scheuren. Succesvolle automatisatie vraagt om zachte grijpers en krachtgecontroleerde aansturing van de robot en de grijper. Robots kunnen worden ingezet om deeg te portioneren, bodems vorm te geven of bollen of schijven deeg te manipuleren.
Maaltijdbereiding
Verdere evolutie gaat naar het assembleren van maaltijdpaketten en voeding. Denk maar aan het portioneren van kant-en-klare maaltijden in daarvoor voorziene trays, of het assembleren van hamburgers op basis van een set aan ingrediënten. Maaltijdbereiding biedt een groot potentieel, omwille van consistentie, efficiëntie en hygiëne.
Coating en glazuren
Het aanbrengen van een gelijkmatige coating van bijvoorbeeld chocolade of glazuur vereist precisie en consistentie. Robotische systemen zijn in staat om dit zowel voor grote hoeveelheden repetitief te doen of custom per design. Zo kunnen bijvoorbeeld automatisch verschillende patronen aan decoraties in glazuur gespoten worden. Automatische dosering reduceert afval en verhoogt precisie.
Picken uit bulk
Geavanceerde 2D- of 3D-visie stellen pickingsytemen in staat om producten (van consistente vorm) rechtstreeks uit de bin te picken, zonder dat deze uitgespreid moeten worden over transportbanden. Individuele producten worden uit de beelden gesegmenteerd, waarna de positie en oriëntatie bepaald worden. Tot slot kan automatisch een grijpstrategie bepaald worden om product per product uit de bin te picken. Bij diepvriesproducten moet een visiesysteem of sensor bijkomend kunnen detecteren dat producten aan elkaar vastgevroren zitten.
Daarnaast stellen custom ontwikkelingen van grijpers robotische systemen in staat om portionering van maaltijden te doen door bijvoorbeeld porties uit een grote voorraad te picken. Denk aan het scheppen van een portie rijst uit een grote bak.
Geavanceerde pick-and-placetoepassingen
Pick-and-place evolueert verder van het oppikken van producten van een transportband en het plaatsen in een verpakking of uitspreiden en gestructureerd verdelen over andere transportbanden. Huidige evoluties zijn er richting het identificeren van kwaliteitsproblemen of het uitsorteren op basis van geavanceerde computervisie. Ontwikkelingen op het vlak van zachte grijpers, robottechnologie en visie openen de weg naar bijvoorbeeld het picken van vleesproducten, wat doorgaans uitdagend is omwille van de onregelmatige, variërende, gladde en niet-rigide vorm.

Transport en verpakking
Palletisatie van verpakkingen is een klassieke toepassing van robotica. De trend gaat hier meer en meer naar mixed palletisatie, waarbij een mix van formaten van dozen op een pallet gestapeld wordt. Daarnaast is ook intralogistiek een onderwerp van automatisering. Naast de klassieke oplossingen met transportbanden kijkt men ook naar het gebruik van AGV’s of AMR’s. Een AMR is een autonome mobiele robot, die zijn weg vindt van punt A naar B zonder tussenkomst van een persoon en zonder vaste paden. Dergelijke automatisatie biedt een flexibele en effectieve oplossing.
Buiten de productie
Naast deze ontwikkelingen van roboticatoepassingen in de productie, zien we die ook in de bredere voedingsbereiding en -verkoop.
Denk maar aan robots die automatisch koken, afwassen, opdienen of zelfs gasten ontvangen in restaurants. Robotische chefs die bijvoorbeeld hamburgers kunnen flippen, of voedsel kunnen portioneren in kant en klare trays, bieden het potentieel tot verhoging van de precisie en consistentie. Het beladen van machines, zoals hierboven vermeld, extrapoleert ook naar het beladen en ontladen van afwasmachines, wat een mogelijke reductie in tijd biedt.
Ook robotische bars, die drankjes mixen en serveren van achter een toog of in een eigen kiosk, zoals Kime, zijn tegenwoordig een ding. Dergelijke robots, of het nu gearticuleerde robots of humanoïde zijn, streven naar een efficiënte afhandeling, consistentie en reductie van waste. Ze mixen drankjes uit een dispenser, vullen glazen of tappen bier. Hou het in de gaten, want er staat nog veel te gebeuren.
Met medewerking van Fanuc, Stäubli en Yaskawa